发布信息:2024年2月28日
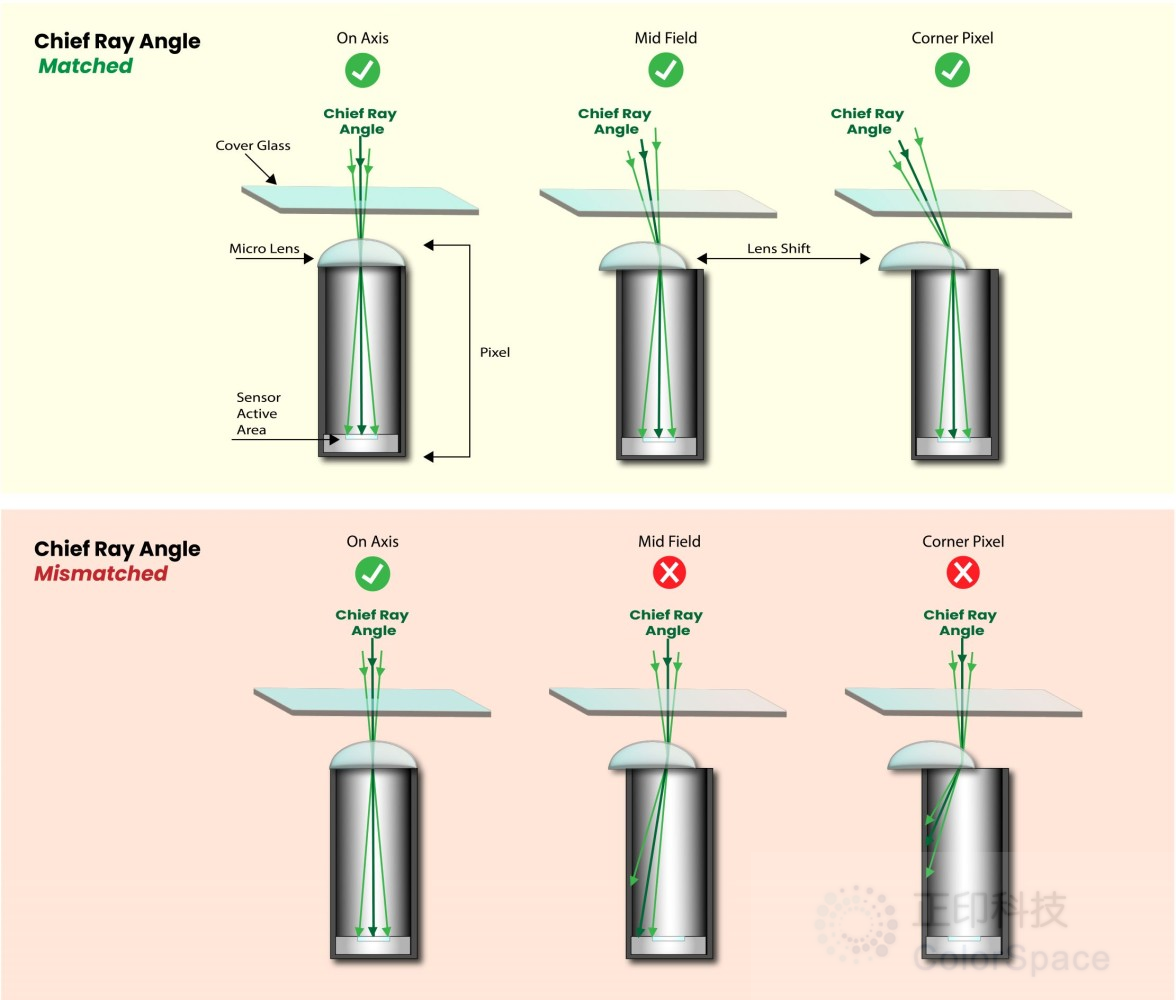
镜头的主光线角度(CRA)和传感器的主光线角如何不匹配,会影响图像质量因素,如色彩不均匀性(colorshading)和暗角。
镜头 CRA 与传感器 CRA 的匹配对于数字成像至关重要。在现代相机系统中,必须将图像传感器像素接收角度与镜头 CRA 相匹配,才能获得最高质量的图像。在许多微型 CMOS 图像传感器中,应用于像素以将光聚焦到光电传感器的有源区域的微透镜的位置从图像传感器的中心到边缘各不相同。这种效应称为微透镜移位,可以在上图中看到。这样做是为了可以将透镜设计得非常薄,这是移动电话应用所需要的,或者可以使用晶圆级堆叠来制造透镜。当镜头 CRA 与图像传感器规格不匹配时,可能会出现图像不均匀和颜色错误等伪影。
在手术成像等内窥镜直径必须保持非常小的应用中,通常使用为手机开发的图像传感器。这里,透镜直径必须很小,但通常透镜的长度并不那么重要。当使用具有高CRA的图像传感器时,镜头设计必须考虑到该规格。镜头 CRA 必须符合图像传感器的 CRA 规格,以防止图像内出现遮蔽或阴影。当镜头和图像传感器 CRA 不匹配时,可能会导致图像出现伪影,例如图像阴影或颜色不匹配效应。镜头和传感器 CRA 不匹配错误是开发新型微型相机系统时面临的常见挑战
CRA不匹配对影响的大小可以使用差平方法来近似计算。这取决于传感器的像素架构,但是这是一个很好的一阶经验法则。
我们通常建议如果传感器的CRA<10°,则CRA匹配范围为±10°;如果传感器的CRA>10°且<20°,则为±7°;如果传感器的CRA>20°,则为±4°。这种不匹配的容忍度必须贯穿整个视场,因此如果传感器的规格表上写着“非线性”,请确保比较完整的图表。
以下是与我们的CIL340 M12镜头相比,问题CRA不匹配与适当不匹配的示例。

镜头与sensor主光线角度CRA不匹配
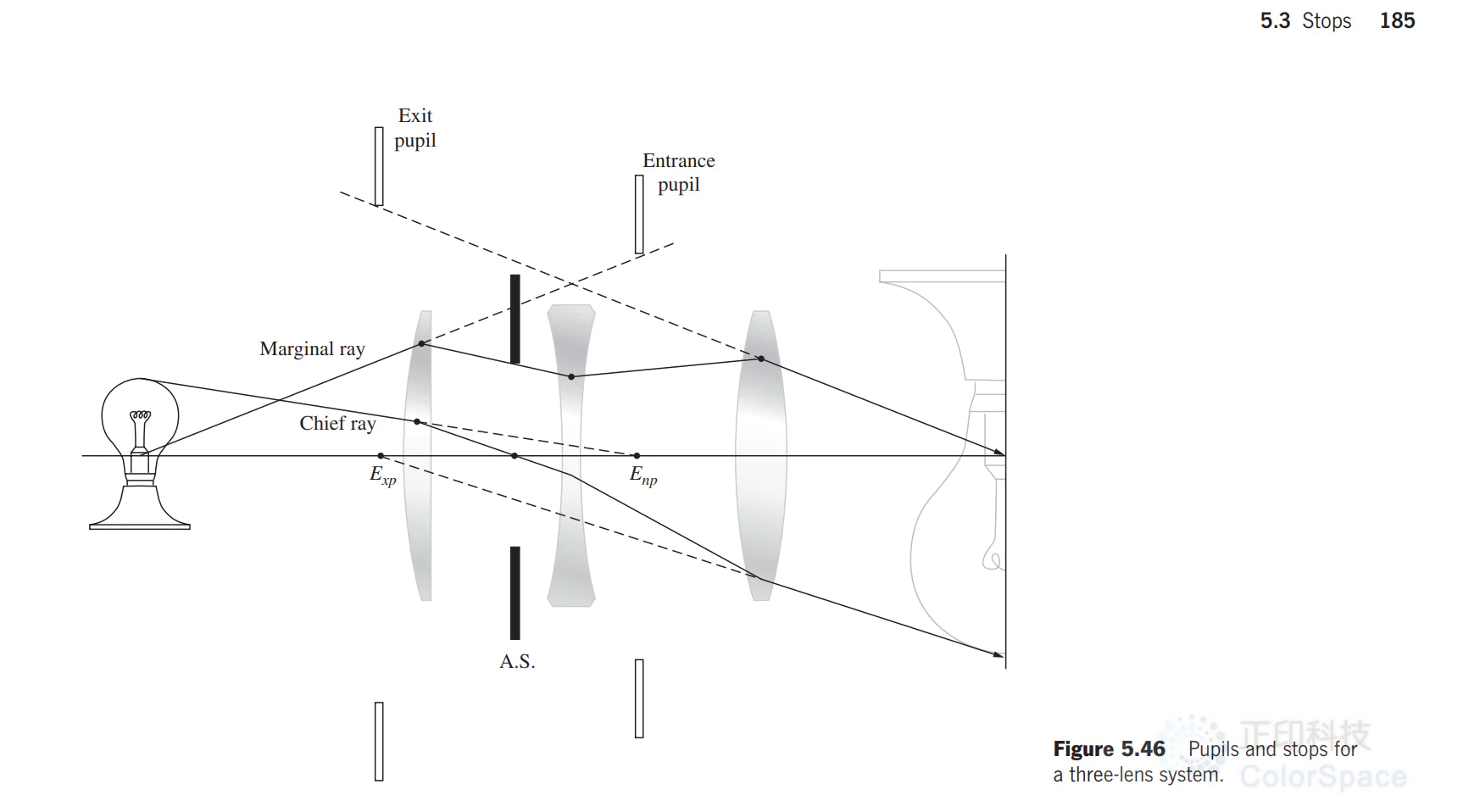
镜头的主光线角度是什么? 镜头的主光线是通过光学系统光阑停止中心的光线。
如果你从物体空间看进镜头,主光线是在入瞳处穿过光轴的光线。
如果你从像空间看,这是在出瞳中心的光线。
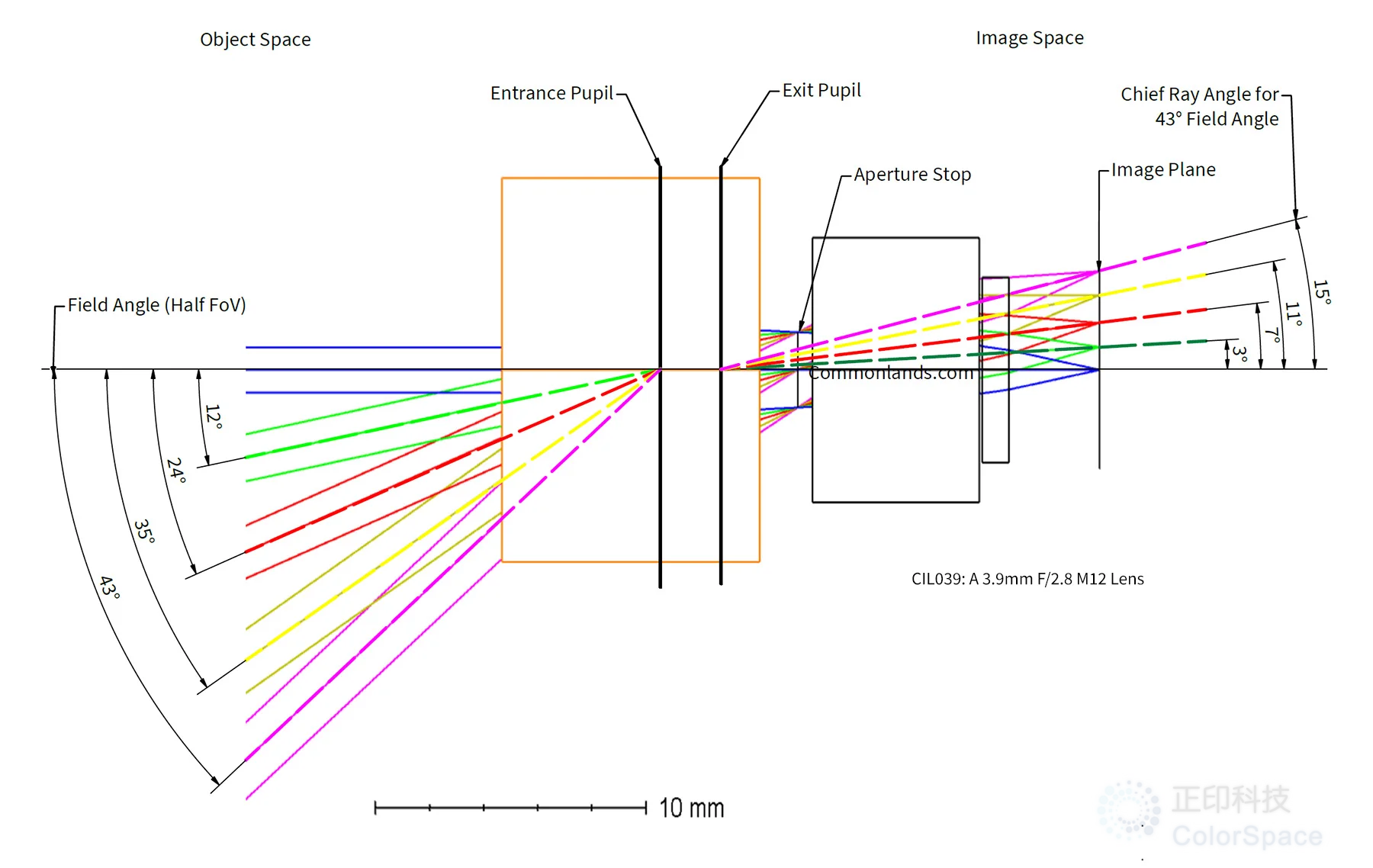
光学主光线和边缘光线 每个被照亮点在物体空间中都存在主光线。
当人们讨论主光线角度时,他们通常指的是与镜头组合的最宽视场相对应的“最大CRA”。
为了准确比较镜头的主光线和传感器的主光线,你必须考虑图像可用区域内的CRA。
CRA不匹配在物理上是什么样子,以及为什么在高CRA角度下CRA不匹配更重要?
低轮廓镜头(短TTL)通常具有非常高的CRA,因为如果在设计上强制要求低CRA,则光学设计性能不会收敛(不好)。
为了帮助手机制造商提高系统级图像质量,传感器制造商调整传感器上微透镜的空间设计以补偿镜头CRA。这种微透镜调整通常只提供给大批量的公司(>10Mpcs/年),所以我们其他人必须尽力选择正确的传感器变体和匹配的镜头。
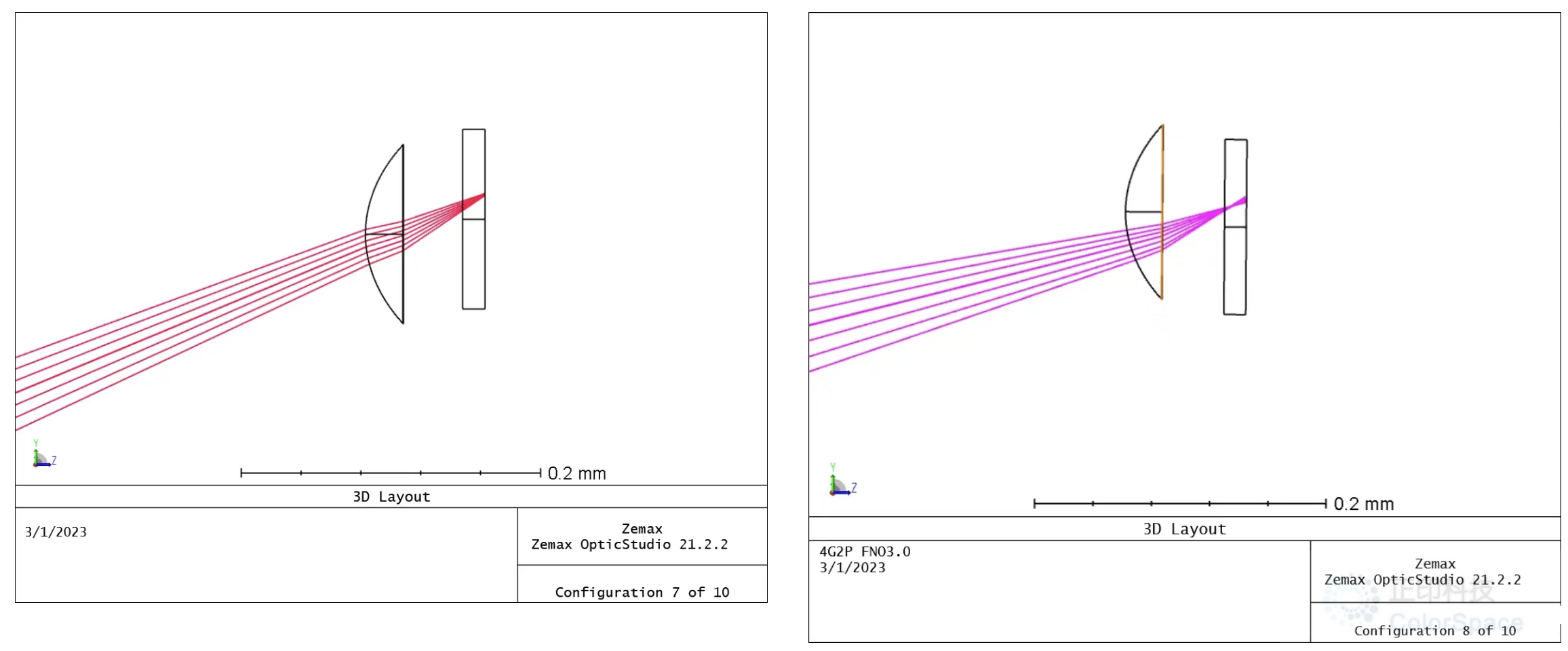
在25°CRA的微透镜的倾斜依赖性和在15°CRA的微透镜的倾斜依赖性
纠正由于CRA不匹配导致的色彩阴影 CRA不匹配可以在后处理中纠正,但仅适用于光照条件良好控制的应用,如用于检查的工业机器视觉。
当光源改变时,补偿变得具有挑战性。这是由于亲切的主题——异视现象。我们之前在常规室内环境中看到过一次重大的CRA不匹配(20°非线性不匹配)被克服,所以在“足够好”的程度上是可行的。这需要高级ISP调整,采用计算的像素级光谱能量分布3DMLUT方法。这反过来将减慢相机的其他性能指标,并/或需要更多的计算,所以通常不是进入这种情况的最佳做法。
此外,只有少数领先的图像质量专家具有达到与传感器在33°时>15°非线性不匹配“足够好”质量的必要知识和经验。所以,除非你幸运地在一个拥有这些专家的团队中,我们强烈建议不要试图通过软件解决>15°非线性CRA不匹配:否则你的项目可能会延迟并超出预算。
无论采取何种方法和专业知识,与拥有良好匹配的镜头到传感器CRA相比,巨大的CRA不匹配会出现更多的颜色调整角落案例。
总结:我们建议尽可能使用低线性CRA(~<20°)镜头/传感器。
否则尽可能使镜头主光线角度与传感器匹配 错误的CRA匹配可能导致从图像中心到角落的径向红到绿的色彩阴影。
这种阴影依赖于照明条件,因此使图像质量调整极为困难。
当尝试使用“移动”传感器和“工业”镜头或反之组建相机时,这是一个常见问题。我们看到多个创业项目遇到这个问题,导致巨大的成本(>10 万美元)和超长时间表(>1年)超时。
联系我们:
如果您有什么问题或想要了解的讯息,欢迎与我们留言,也可邮件咨询: sales@colorspace.com.cn,分享您的看法或提出您的问题!

Was this helpful?
4 / 0
