发布时间:2023年3月27日
Flare,也被称为杂散光或耀斑,是指通过设计的光路之外到达检测器(即图像传感器)的任何光线(定义来自IEEE-P2020预发布标准)。杂散光可以被认为是系统的、与场景有关的光学噪声。根据造成杂散光的机制,它可以在场景中产生幻影物体(即幽灵/鬼影),降低图像部分的对比度(如遮挡咋桑),并有效地减少系统的动态范围。这些因素会对摄像系统在各种情况下的应用性能产生不利影响。
摄像机的杂散光可以通过捕捉放置在摄像机视场内(或视场外)不同角度的明亮光源的图像来测量,然后将这些捕捉到的图像处理成杂散光度量图像,其中图像中的每个像素都被重新映射以代表一个炫度量。光源物体本身被排除在外,或在图像中被屏蔽掉,因为它不被认为是杂散光。各种信息和汇总统计可以从所得到的杂散光度量图像中得到。
Imatest支持的主要归一化方法是通过光源的直接图像内的图像水平(平均数字数(DN)或像素值)进行归一化。通过这种方法,公制图像中的值代表了图像中杂散光的水平/反应,相对于直接来自光源的水平/反应。

由配备 C 型接口鱼眼镜头(FOV >180 度)的单色近红外相机拍摄的一系列杂散光图像的 GIF。使用 Imatest 电动万向节旋转相机。这些图像显示了角直径约为 0.5 度的红外准直光源的 220 度水平扫描,使用 1 度的视场角增量。在光源的直接图像周围可以立即看到衍射尖峰(这些可能被归类为杂散光)。一些杂散光伪影只出现在特定的光源角度,突出了测试覆盖率的重要性。
如何测试杂散光
杂散光测试需要在一个黑暗的房间里捕捉一个小而明亮的光源的图像。为了建立现场覆盖,可以旋转相机或移动光源,以改变光源相对于相机的角度。捕获的图像随后被处理成 “归一化杂散光度量图像”,这是Imatest杂散光(耀斑)分析的主要输出。许多其他输出可以从公制图像数据中得到。
总之,要测试杂散光,你需要:
- 一个黑暗(黑色)的房间
- 一个小而亮的光源
- 一个可以旋转被测相机的方法(或一个可以在被测相机周围移动光源的方法)。
- 分析软件
物理设置和校准
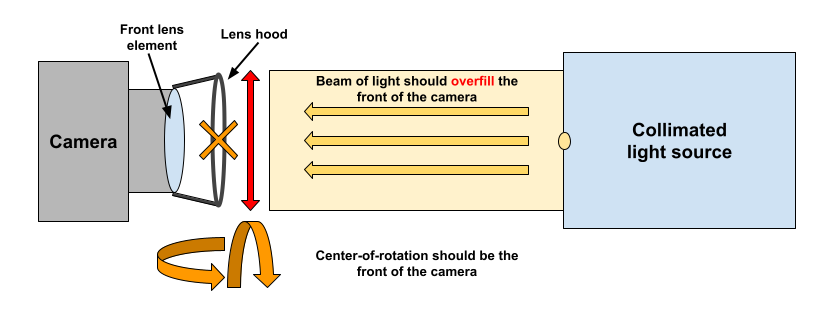
对于受控测试,通常建议使用明亮的准直“点”光源。但是,如果相机设备的前部非常大,或者如果相机应用的关注源不在“无限远”,发散光可能会有用。
光源应该是点状的,因为光源的角度大小会影响图像中杂散光的形式。请注意,图像中源的大小与相机的瞬时 FOV 相关。较小的“点光源”会产生尖锐的高频杂散光伪影,而较大的“扩展光源”会产生模糊的低频杂散光(类似于面纱杂散光)。这并不是说点源不会导致遮蔽杂散光,而是说扩展源不太可能导致明显的重影。来自扩展源的杂散光表示来自点源的杂散光在扩展源所覆盖的区域上的卷积。这是基于测试卡的杂散光测试方法仅限于测量遮蔽杂散光的根本原因。
从光源射出的光线应充满被测相机设备的正面,同样包括任何可能影响光路的正面。例如,对于一个有多个摄像头模块被保护玻璃板覆盖的手机,在测试任何一个摄像头模块时,整个玻璃板都应该被光充满,因为杂散光路有可能来自该表面。
当旋转相机或光源进行杂散光测试时,旋转中心应该是被测相机设备的正面或可能影响光路的设备的最前端表面。例如,如果相机有一个镜头罩,相机的位置应使镜头罩的前端位于旋转中心。这样做的第一个原因主要是为了尽量减少投射光束的必要面积。在前端以外的地方旋转可能会引起一个杠杆臂,需要更大的光束来持续地在所有角度上过度填充设备。 这样做的另一个原因是,摄像设备的前面是杂散光路的起点。
摄像机应与从光源发出的投射光束很好地对齐。摄像机可能需要在水平和垂直方向上平移,以使其在光束的中心位置对齐。摄像机可能还需要旋转,使光源的主要投影与图像的 “中心”(通常是数字中心)对齐,以作为对应于场角为零的轴上位置。旋转对准可以用电动万向节来实现。平移对准可以通过电动测试台实现。
测试环境

杂散光测试的理想环境是真空中无限大、无限暗的房间。
对于实际的实验室测试,建议使用一个有黑暗/黑色表面的房间。房间的表面可能需要在考虑用于测试的全部光谱中具有抗反射性。如果房间一开始就不暗,可以使用遮光窗帘来有效地使环境变暗。遮光窗帘不应立即围绕设置,而应在窗帘和设置(相机和光源)之间留出一些空间,以进一步防止不必要的反射。围墙越大越好。可以在整个设置中使用额外的挡板,以进一步减少不相干的反射和环境光。
理想情况下,杂散光测试应该在无尘环境下进行。漂浮在光束中的大量灰尘可能会通过诱发不必要的反射和阻挡光线来影响测量结果。空气过滤器可以帮助实现一个更清洁的环境。此外,空气中一定程度的湿度可能有助于减少漂浮的灰尘数量。
测试覆盖率:范围和抽样
对于杂散光测试,应始终考虑测试范围(范围)和采样(delta)。测试覆盖率的原理有点类似于只用图像中心来测量清晰度(MTF/SFR),但这种测量可能无法代表图像中其他位置的性能(例如,图像角落)。
同样,杂散光测试的最基本形式可能涉及对光源的单一图像的分析。然而,杂散光是与场景有关的,因此,可能需要在光源相对于相机处于不同角度的情况下测试多个图像。这可能包括光源位于相机视场(FoV)之外的图像,因为杂散光往往来自于FoV之外。
方位角和场角代表光源相对于相机的位置。为了进行杂散光测试,场角为零时应与图像空间中的光学中心相吻合。对于全面的测试,建议分析包括光源位置在摄像机最大视场角以外的图像。
光源相对于摄像机的位置或角度可以由两个属性来定义:场角和方位角。杂散光 “捕捉计划 “可以定义为具有这两个属性的一系列位置。对于Imatest的杂散光分析,每个输入图像的光源方位角和场角都可以通过配置文件来定义和参考分析。
一个简单的杂散光捕获计划的例子是光源的单轴扫描,其中相机被旋转(或光源被移动),使光源覆盖了从相机视场中心到视场外某处的弧线,旋转增量的间隔相等。这种捕捉计划有效地测试了单一方位角的多个场角。另一个选择是在整个视场范围内进行单轴扫描,例如,在摄像机前面覆盖180度的弧线。对于全面的杂散光测试,1度或更小的场角增量可能是必要的,这取决于摄像机的视场角。
杂散光捕获计划的另一个例子是对光源进行多轴扫描,其中相机被旋转(或光源被移动)以在几个方位角进行多个单轴扫描。例如,一个有效的捕捉计划可以是在0到90度的场角进行测试,以0.1度为增量,方位角对应于水平、垂直和两个对角线,其中对角线的角度与图像的角落相交。
单轴扫描假定是径向对称的。某些由灰尘、镜头表面缺陷或其他不对称引起的炫光路可能不会被捕捉到,因此,为了全面测试,可能需要在多个方位角测试炫光。单轴和多轴扫描都可以用Imatest电动万向节来进行。
一系列杂散光图像的GIF,这些图像是由单色近红外相机与C-mount鱼眼镜头(FoV>180度)配对拍摄的。使用Imatest电动万向节旋转相机。这些图像显示了红外准直光源的220度水平扫描,场角增量为1度。在主光源投影的周围可以看到衍射尖峰(这些可以归类为杂散光)。一些杂散光伪影只出现在特定的光源角度。

用相机对光源进行多轴扫描的GIF,显示出明显的 “花瓣耀斑”。使用Imatest机动万向节旋转相机,以便在光源相对于相机的多个方位角和场角的情况下拍摄一系列图像,包括光源在相机视场外的场角。
输入图像数据
归一化杂散光的一个基本假设是,输入数据是线性的。某些图像信号处理(ISP),特别是那些影响线性的处理(如伽马校正),可以通过影响图像中的相对杂散光反应来影响测量。尽管如此,也可以对经过处理的图像进行分析,因为看到相机的ISP如何影响感知的杂散光是很有价值的。
Imatest杂散光分析支持包含单色或3通道(如RGB)图像数据的输入图像文件。使用Read Raw设置,也支持未格式化的原始图像。
归一化的杂散光度量图像
Imatest杂散光分析的主要输出是杂散光度量图像。杂散光度量图像可以输出为FITS文件和颜色映射图(保存为图像文件和/或视频文件)。
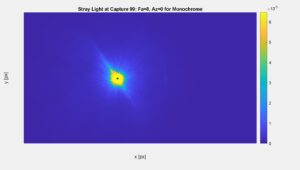
归一化杂散光度量图像的颜色映射图。输入的线性图像数据已经通过单独的轴上图像的光源直接图像的水平(数字/像素值)进行了归一化。对于轴上参考图像,我们使用了较短的曝光时间,并用中性密度滤镜对光源进行了衰减,这样光源的直接图像就不会饱和。我们计算了参考图像中光源的直接图像内的平均水平。然后我们对参考图像和测试图像之间的光照度差异进行补偿,计算出高于饱和度的理论水平,作为最终的 “补偿 “归一化系数。在这里,衡量图像中的杂散光水平被测量为大约0.0006%或更少的来自光源直接图像的水平,尽管饱和的杂散光(黄色)的量级可能更大。使用的光源有一个大约0.5度的角直径(类似于太阳),计算的指标是扩展源拒绝率(ESRR)[2]。该光源的直接图像被掩盖掉了,因为它不是杂散光。
归一化杂散光背景
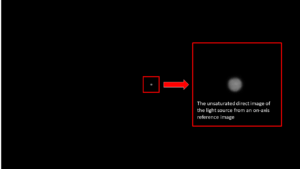
对于Imatest的分析,输入应该是完全黑暗的房间里一个小而明亮的光源(例如,一个点状光源)的线性图像。测试的一个关键假设是,这些图像中的任何反应都是杂散光,而不是来自光源直接图像的反应。光源的直接图像是图像中代表光源实际大小的小区域(即,如果图像中没有杂散光或发花)。在分析过程中,光源的直接图像被屏蔽掉(忽略),因为它不是杂散光。
使用Imatest,输入图像中的每个像素都可以被归一化,以代表杂散光的度量,其中归一化的方法决定了该度量。在高层次上,归一化的杂散光计算可以简单地写成:

请注意,这种形式的方程对应的是杂散光传输,而倒数则对应杂散光衰减。
Imatest支持的主要归一化方法是通过光源的直接图像内的图像水平(平均数字数(DN)或像素值)来归一化。通过这种方法,公示图像中的数值代表了图像中杂散光的水平/反应,相对于直接来自光源的水平/反应。如果用一个点光源进行测试,这种归一化方法对应于点光源拒绝率(PSRR)指标[2]。如果用一个扩展的光源进行测试,这个指标将是扩展源拒绝率(ESRR)[2]。例如,太阳在 “无限远 “处是一个扩展光源,其角直径约为0.53度,与其他更远的星星不同,它们被视为点光源。光源的角度大小可以决定图像中表现出来的杂散光的形式,这是用小而亮的光源进行这种测试的根本原因之一。
归一化补偿
该测试的另一个关键假设是,用于归一化测试图像数据的水平(即归一化系数)低于饱和度。按饱和度水平归一化提供的结果相对没有意义,因为饱和数据的水平是模糊的。如果按饱和度归一化,所得到的度量图像将有从0到1的值,其中1对应于饱和度水平。对于许多相机来说,光源的直接图像可能需要饱和,以便在图像中诱发杂散光。这是相机传感器的动态范围内在地限制了测试的动态范围。然而,在这种情况下,我们可以使用单独的曝光良好的参考图像的信息,在这些图像中,光量已经被衰减,从而使源的直接图像不饱和。根据对相机的控制,有不同的技术可以用来产生源的不饱和图像,然后产生 “测试图像等效”(补偿)的归一化系数,如[1]:
调整曝光时间 t
调整系统增益 p
调整光源水平 L
例如:使用ND滤光片和/或直接控制光源功率
这些技术可以单独使用,也可以结合起来形成一个补偿系数 C,作为基本归一化系数的乘数Nbase。来计算补偿归一化系数NCompensated(最终用于归一化测试图像数据)。在这种情况下,基础归一化系数Nbase是参考图像中源的直接图像的图像级别(数字编号或像素值)[1]。整个过程可以用几个简单的方程式来描述:

请注意,这些技术假定摄像机数据是线性的或可线性化的,并且互易律成立[1]。下一节提供了一个使用补偿系数的归一化杂散光计算实例。
解释归一化杂散光度量图像数据
考虑下面的例子,一个输出线性化16位图像数据的相机的测试程序:
1、对于测试图像,我们将光源的水平和相机的曝光设置为100ms的持续时间,使图像中出现明显的可测量的杂散光伪影。然而,在这些图像中,光源的直接图像是饱和的
2、对于参考图像,我们将相机设置为1ms的最低曝光,并在光源前面放置一个密度为2.5(透射率=10^(-2.5)=0.316%)的ND滤镜来衰减光线,使光源的直接图像在图像中不饱和。
3、我们从参考图像中测量源的直接图像内的(平均)水平。我们测量的平均不饱和度(像素值)为31941.617。这是基础归一化系数Nbase,我们将用来归一化我们的测试图像数据。
4、我们通过使用已知的ND滤光片透射率和曝光差异,取测试图像的光照度和参考图像的光照度之比,来补偿基础归一化系数,计算出 “测试图像等效 “的归一化系数。补偿系数为:C=(100%/0.316%)*100ms=31645.6。补偿后的归一化系数为:NCompensated=Nbase*C=1010082618.74。这个归一化系数是以DN(数字或像素值)为单位。因此,我们基本上是通过高于饱和度的理论像素值进行归一化。
5、作为计算度量图像的一个步骤,我们屏蔽掉(忽略,设置为NaN)测试图像中光源的直接图像,因为它不是杂散光。
6、我们计算归一化杂散光度量图像:归一化杂散光=(输入图像数据[DN]/NCompensated[DN]
看一下结果,我们看到杂散光度量图像中的数值从0到6.476E-5。这告诉我们,图像中杂散光的最大响应被测量为来自光源直接图像的约0.0006476%的响应。这里,6.476E-5的值对应于饱和的图像数据(对于这台相机的图像数据,饱和度为65408,除以
什么是可接受的杂散光水平的问题可能取决于相机的应用。这类似于问 “什么是可接受的MTF测量 “的问题,这也是相对模糊的,取决于系统的应用。然而,我们可以考虑摄像机所关注的光源的特性来确定一个可接受的水平。以太阳为例,它是一个小而明亮的光源,考虑以下ADAS/汽车应用的摄像机的例子:
在应用中,当太阳在视场内时,相机以曝光时间T运行,相机上的平均辐照度为E。
测试的意图是模拟应用中的杂散光性能,但测试光源水平的测量只有E/10。
假设线性和互易性,相机可以用曝光时间T×10来模拟应用杂散光的性能进行测试。
在得到的测试图像中,杂散光的水平应该与应用中的杂散光水平相对应。然而,仍由用户来决定可接受的水平。
在产生的测试图像中,杂散光的水平应该与应用中的杂散光水平一致。然而,这仍然是由用户来决定可接受的水平。
可接受的杂散光水平也可能取决于相机系统的曝光算法。对于一个给定的相机,不同的自动曝光算法或测光技术可用于给定场景的曝光,允许不同程度的饱和度。例如,如果相机的曝光算法阻止图像达到饱和度,可接受的杂散光水平可能比曝光算法接受大量的饱和度和开花(在这一点上,我们可能看到更多的杂散光)。此外,在弱光下工作的相机可能更关注较低水平的杂散光。因此,保持同一个例子,这意味着6.476E-5的归一化杂散光值对某些相机和场景来说可能是有问题的,但对其他相机和场景来说不是。
总之,杂散光指标图像可能需要进行客观和主观的分析。客观分析可能包括查看杂散光的测量水平,并根据杂散光度量图像数据得出统计数据(例如,作为光源场角的函数绘制的各种统计数据)。主观分析可能涉及目视检查图像数据,看杂散光伪影的颜色、形状和大小是否对图像质量有负面影响,和/或检查这些伪影是否会影响相机的应用。例如,是否有任何尖锐的鬼魂伪影,可能类似于真正的有关物体(如交通灯信号),或者它们只是不讨好/分散观看者的注意力?是否有明显的遮挡杂散光,它如何影响系统的对比度分辨率或MTF?图像中的任何杂散光伪影是否有可能导致系统失效的情况?
联系我们:
如果您有什么问题或想要了解的讯息,欢迎与我们留言,也可邮件咨询: sales@colorspace.com.cn,分享您的看法或提出您的问题!

Was this helpful?
4 / 0

[…] 太阳和其他类型的准直点光源可能是相机的常见关注光源。因此,测试方法可能涉及试图模拟它们的特性。在下文中,我们描述了一些要考虑的其他因素,特别是在实验室环境中物理模拟这些特性。有关杂散光测试因素的更多细节,可以参考(如何测量杂散光Stray Light?)。 […]