一、范围
本标准规定了医用内窥镜摄像系统的术语和定义、要求、试验方法。
本标准适用于内窥镜检査和手术中作为内窥镜功能供给装置的医用内窥镜摄像系统(以下简称摄像系统)。
本标准不适用于特殊光谱作用和非可见光谱成像的摄像系统。
二、规范性引用文件
列出了本文件应用时必不可少的其他文件,如GB9706.19医用电气设备内窥镜设备安全专用要求。
三、术语和定义(下列术语和定义适用于本文件。)
3.1 转换函数
3.1.1 光电转换函数OECF
摄像系统物方亮度和相应的输出信号之间的理想关系。
3.1.2 光电转换函数
OECF反函数。
3.2 噪声
摄像系统响应信号中内部产生的扰动。
3.2.1 总体噪声
固定模式噪声和随机噪声的叠加。
3.2.2 固定噪声模式
面传感器单元间输出信号的差异。
3.2.3 随机噪声
面传感器某一单元多次曝光间的输出信号的差异。
3.3 信噪比 SNR
特定信号电平上,输出信号与噪声信号均方根值(rms)的比率用对数值表示,表达式见(1):
式中:
S —— 输出信号;
N —— 噪声信号均方根植。
3.4 饱和值
进一步增加物面亮度而输出信号保持恒定不变的输出信号值。
3.5 静态图像宽容度
摄像系统在单次曝光中可分辨的最大临界物面亮度和最小临界物面亮度之比。
3.6 空间频率响应 SFR
摄像系统中,输出信号经OECF反函数计算值的调制度相对于标板物面亮度的调制度之比,与标板空间频率之间的反函数关系。
3.7 基于正弦波的空间频率响应 s-SFR
在标板为正弦波调制图时的SFR。
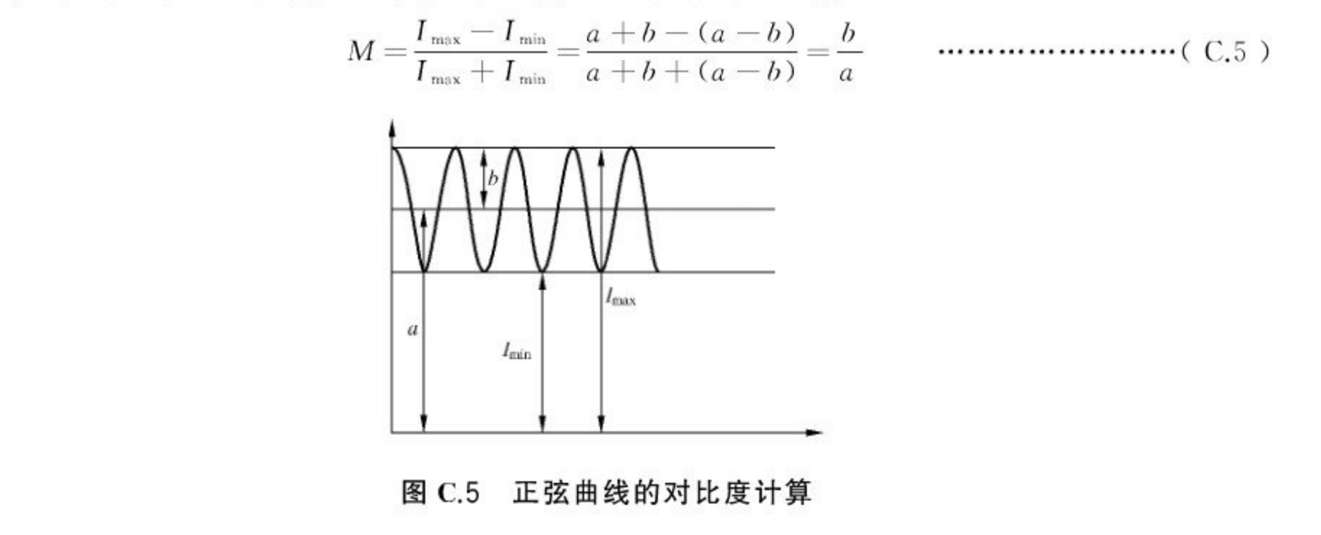
3.8 调制度
最大信号值减去最小信号值与最大信号值加上最小信号值之间的比值。
3.9 光谱中性
对于某一波段的光保持不变的反射或透射特性。
4. 要求
4.1 可拆卸镜头的要求
4.1.1 调制传递函数(MTF)
制造商在随附资料中应给出可拆卸镜头MTF值为50%时所对应的空间频率的标称值,允差为-20%,上限不计。
4.1.2 焦距
制造商在随附资料中应给出可拆卸镜头的焦距参数c对于固定焦距镜头,焦距的标称值允差±20%。对于可变倍镜头,最小焦距的标称值允差为+ 20%,下限不计;最大焦距的标称值允差为 一20%,上限不计。
4.2 亮度响应特性
制造商应在技术资料中给出适配监视器以相对值表示的输出亮度电光转换函数或数据列表。数据列表的取样点不少于10个,并覆盖整个宽容度内区域。
摄像系统输出信号按该电光特性计算所得亮度与实际被测标板各灰阶亮度应保持良好的线性度, 线性拟合系数R2应不小于0.98。
若制造商声称适配监视器的输出亮度和物面亮度是按照非线性设计的,那么制造商应给出相应的 评价要求和方法。
注:推荐适配监视器的输出亮度电光特性采用现冇标准的OECF反函数。
4.3 信噪比
制造商在技术资料中应给岀摄像系统的随机噪声信噪比的标称值以及对应的摄像模式(若摄像系统有多种摄像模式时)。
信噪比的允差为一20%,上限不计。
4.4 空间频率响应
制造商在随附资料中应给出摄像系统在相应测量条件下,SFR值为50%和30%时所对应的空间频率的标称值。对于可与多种可拆卸式镜头配合的摄像系统,应给出与该空间频率响应对应的镜头型号。对于可采用多种摄像模式的摄像系统,应给出与该空间频率响应对应的摄像模式。
SFR值为50%和30%时所对应的空间频率的允差为一20%,上限不计。
4.5 静态图像宽容度
制造商在随附资料中应给出摄像系统的挣态图像宽容度的标称值以及对应的摄像模式(若摄像系统有多种摄像模式时)。
静态图像宽容度的允差为一20%,上限不计。
5. 试验方法
5.1 可拆卸镜头的要求
5.1.1 调制传递函数(MTF)
在测量光路中放置一个中Ф10mm的孔阑,用足够准确度的通用设备测量。
5.1.2 焦距
在测量光路中放置一个中Ф10mm的孔阑,用足够准确度的焦距仪测量。
5.2 亮度响应特性试验方法
检查制造商提供的技术资料内容。
按照附录A中规定的方法测蛍摄像系统的亮度响应特性。
附录A中关于亮度响应特性试验方法要求:
A1.1 测试标板
如图A.1所示.测试标板为可充满整个视场的背景B和小灰阶块A构成。
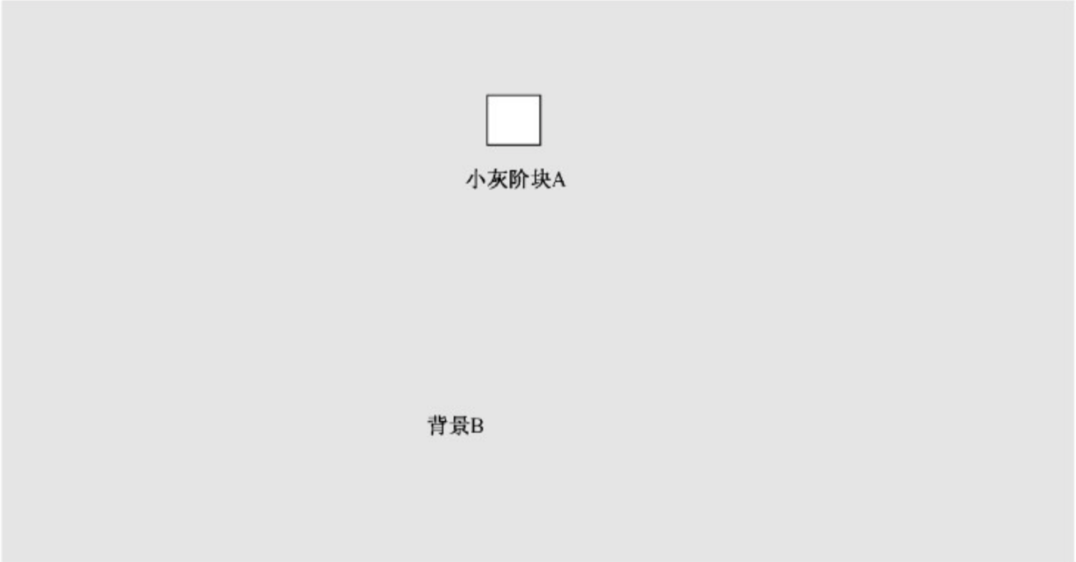
背景B为光谱中性灰阶板。
小灰阶块A为亮度可独立变化的照明体,照明体亮度变化范围应足以覆盖被测摄像系统的静态图像宽容度,且其最小亮度应远低于被测摄像系统的暗区截止临界亮度值。该灰阶块A的面积以及位置设賞应能保证在其亮度调节过程中不改变被测摄像系统包括电子快门在内的整体增益。
A.1.2 光源
如图A.2所示,背景B的照明光源B和小灰阶块A的照明光源A均采用模拟D65标准照明体的光源,其模拟近似度应使得光源的光谱分布曲线形状与所模拟的标准照明体的光潜分布曲线形状相似,色温允差±10%。如果在说明书中声称摄像系统适用于某一类光源照明,试验光源可以采用该类光源或者模拟该类照明光源。
背景B照明的空间均匀度应不超过20%,小灰阶块A照明的空间亮度均匀度应不超过5%。亮度时间波动度应不超过3.24X10-SNRtemp/20(其中SNRtemp为被测摄像系统的随机信噪比)。
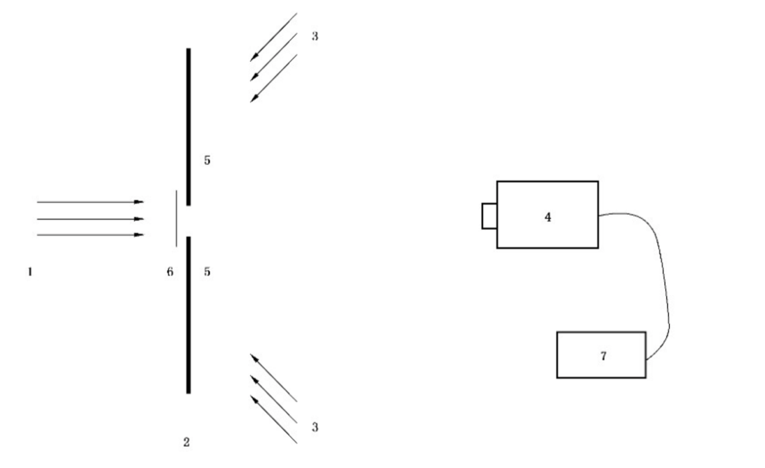
图A.2光路布局图
说明:
1——光源
2——测试标板
3——光源B
4——摄像系统
5——小灰阶块窗口
6——小灰阶块A
7——图像采集器
A.1.3 亮度计
要求能够精确测量亮度,测量精度不低于1级。
A.1.4 图像采集器
要求能够无损采集并保存各种编码模式的图像数据。
A.2 步骤
A.2.1 测试条件
测试环境的温度为(23±2)℃,相对湿度应为(50±20)%。
测试环境的暗照度不大于1lux。
控制光源的供电电压稳定度应控制在±2%以内。
电源应充分预热稳定。
A.2.2 测试过程
A.2.2.1 白平衡
对于具有白平衡功能的摄像系统,使用A.1.1测试标板在测试条件下进行白平衡。
A.2.2.2 摄像系统的取景
调整拍摄距离至需要的位置记为测量工作距d0。对于适配可目视观察内窥镜的摄像系统,d0为500mm;其他d0为设计工作距。对于可变焦的镜头,在最小焦距下测量。
A.2.2.3 对焦
若摄像系统具有自动对焦功能,拍摄测试标板时可以稍微对焦模糊,以减少由区块本身的纹理质地产生的噪声。这里强调的是“稍微”,区块之间的边界应保持明显区别。
A.2.2.4 设置测试标板上背景B的亮度
调节测试板上背景B的亮度,以达到制造商规定的亮度值,在小灰阶块A的整个亮度调节过程中,背景B的亮度应使被测摄像系统的整体增益保持不变。
A.2.2.5 调节测试板上小灰阶块A的亮度及采集分析图像
逐渐改变测试标板小灰阶块A的亮度,在宽容度范围内选择基本均布的不少于10个的不通过亮度水平。对应每个亮度水平,测量该亮度值,记录为L;并用摄像系统拍摄测试标板,用图像采集器采集n 辐图像并保存。n 不小于8。
对采集的图像,在小灰阶块A区域选取(M× N)个像素(推荐32×32),分别读取每幅图像中红、绿、蓝各通道的对应输出信号(M×N×3)矩阵的输出信号。
对某亮度水平Li,红、绿、蓝各通道信号平均值Ri、Gi、Bi,分别由(M×N×n)个像素的R、G、B值的算术平均计算得到。
A.2.2.6 计算显示亮度值以及拟合度
对所获得的Li对应Ri、Gi、Bi数据组,采用制造商给出的输出亮度光电转换函数(OECF的反函数)计算显示亮度值Lyi(yi分别代表Ri、Gi、Bi)。若制造商给出的是数据列表,则输出亮度光电转换函数可采用分段线性拟合得到。Lyi对应实际被测标板各灰阶亮度Li的结果应以表格和/或图形的形式来表述。
计算L-Ly的线性拟合度R2(有效位至小数点后2位)。计算式如下:

式中:
m —— 灰阶数
L —— Li的平均值
Ly —— Lyi的平均值
红、绿、蓝通道应分别计算。
A.3 结果表述
实验报告包括以下信息:
- 被测摄像头系统型号和编号;
- 镜头状况:包括型号、焦距、和/或可变倍镜头的变倍状况; 注:不可拆卸镜头的型号往往与摄像系统自身型号相同。
- 摄像模式; 注:适用于可采用多种摄像模式的摄像系统。
- 所使用光源特性;
- 测试标板上背景B的亮度L0;
- 测量工作距d0;
- 制造商给出的输出亮度电光转换函数或数据列表;
- 亮度响应特性线图;
- L-Ly的线性拟合度R2。
5.3 信噪比试验方法
检査制造商提供的技术资料内容。
按照附录B中规定的方法测量摄像系统的信噪比。
附录B中信噪比试验方法:
B.1 设备
B.1.1 测试标板
同A.1.1
B.1.2 光源
同A.1.2
B.1.3 图像采集器
同A.1.4
B.2 步骤
B.2.1 测试条件
同A.2.1
B.2.2 测试过程
B.2.2.1 白平衡
同A.2.2.1
B.2.2.2 摄像系统的取景
同A.2.2.2
B.2.2.3 对焦
同A.2.2.3
B.2.2.4 设置测试标板上背景B的亮度
同A.2.2.4
B.2.2.5 改变测试标板上小灰阶块A的亮度计采集分析图像
逐渐改变测试标板小灰阶块A的亮度,在宽容度范围内选择基本均布的不少于10个的不通过亮度水平。对应每个亮度水平,测量该亮度值,记录为L;并用摄像系统拍摄测试标板,用图像采集器采集n 辐图像并保存。n 不小于8。
对采集的图像,在小灰阶块A区域选取(M× N)个像素(推荐32×32),分别读取每幅图像中红、绿、蓝各通道的对应输出信号(M×N×3)矩阵的输出信号。
B.2.2.6 根据红、绿和蓝各通道输出信号值,计算亮度信号分量
对某亮度水平,水平亮度信号分量Y由(M×N×n)个像素的Y值算术平均计算得到,Y由红、绿和蓝各通道输出信号加权后获得。各通道加权重值按照制造商给出的编码方式取值。
注:常规的标准编码可查阅ISO 22028-1:2014.
B.2.2.7 计算噪声(以标准差表示)
根据B.2.2.6 得出的Y值,计算色差通道(R-Y)和(B-Y)的输出信号值。
噪声可以根据亮度分量标准差σ(Y)、色差通道标准差σ(R-Y)和σ(B-Y)按照式(B.2)进行计算。
σ(D)=[σ(Y)²+0.279σ(R-Y)²+0.088σ(B-Y)²]1/2…………………………(B.2 )
式中:
σ(Y) —— 亮度信号分量Y的标准差;
σ(R-Y)—— 缺红亮度通道标准差;
σ(B-Y)—— 缺蓝亮度通道标准差。
式中(B.2)中标准差的计算遵从以下过程:
对于M×N区域内任意位置坐标(i,j),设Pk(i,j) 为第k张图像在(i,j)坐标位置上的信号输出值,按式
(B.3)计算该坐标位置上n幅的信号输出平均值。

按式(B.4)计算该坐标位置上n幅的信号输出标准差记为σ(i,j)。

按式(B.5)计算在M×N区域内随机噪声的平均值记为σtemp。

B.2.2.8 计算不同亮度水平(不灰阶)的信噪比,并绘制信噪比曲线
根据摄像系统拍摄到的不同亮度水平(不同灰阶)的亮度信号分量Y和噪声值,计算不同亮度水平(不同灰阶)的随机噪声信噪比,并绘制对应的信噪比曲线,纵坐标为信噪比,横坐标为亮度信号分量Y值。
B.2.2.9 确定摄像系统的信噪比。
在信噪比曲线上找到归一化后亮度信号分量Y值为0.707的信噪比。如果0.707不完全等于某个灰阶对应的输出信号值,建议采用分段线性插值计算,来获取信噪比的估计值。
B.3 结果表述
试验报告应包括以下信息:
- 被测摄像系统型号和编号;
- 镜头状况:包括型号、焦距、和/或可变倍镜头的变倍状况; 注:不可拆卸镜头的型号往往与摄像系统自身型号相同。
- 摄像模式; 注:适用于可采用多种摄像模式的摄像系统。
- 所使用光源特性;
- 测试标板上背景B的亮度L0;
- 测量工作距;
- 信噪比线图;
- 信噪比值。
5.4 空间频率响应试验方法
检査制造商提供的随附资料内容。
按照附录C规定的方法测量摄像系统的空间频率响应。
附录C中空间频率响应试验方法如下:
C.1 设备
C.1.1 测试标板
正弦波星形测试标板。该标板应是光谱中性的,背景的透(反)射率为18%。星图应是一个经过正弦波调制的星光式图案,频率通常是144个周期每圈,如图C.1所示。对于较低分辨率的内窥镜系统来说,可以使用72个周期的星形或更少周期的星形。
测试标板的调制度已知,并不小于96%。标板在半径方向上有至少32个黑色等分刻线。
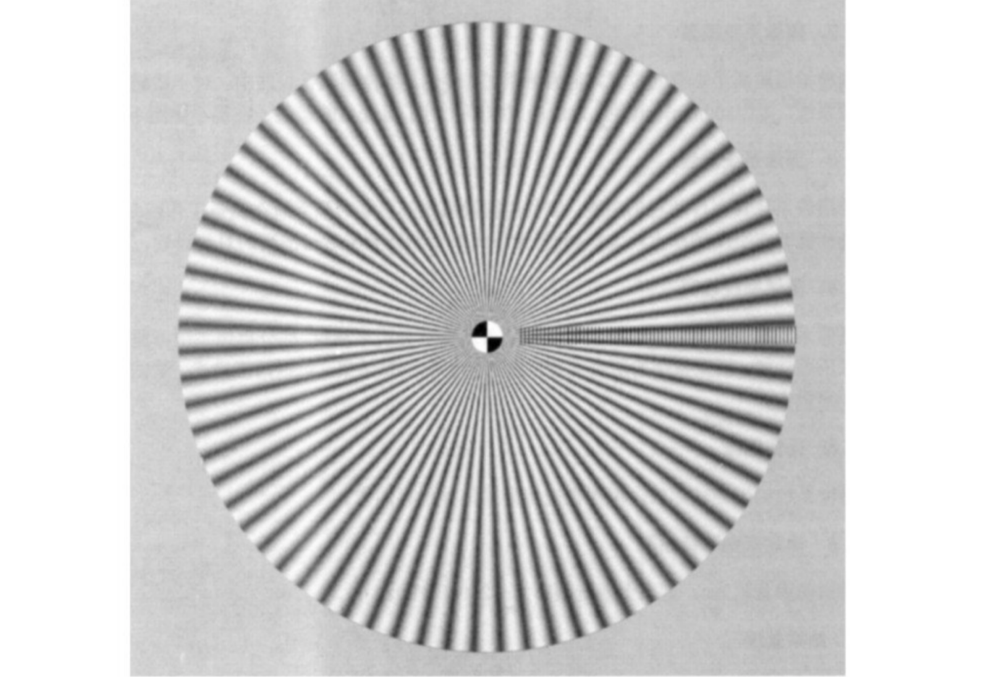
其他等效的正弦波测试标板也可使用。
C.1.2 光源
采用模拟D65标准照明体的光源,其模拟近似度应使得光源的光谱分布曲线形状与模拟的标准照明体的光谱分布曲线形状相似,色温允差±10%。
照明光源的布置应使得在标板的区域内照明均匀,区域内任意位置处的亮度与中心亮度的差值应在±10%范围之内。
C.1.3 图像采集器
同A.1.4。
C.2 步骤
C.2.1 测量条件
C.2.1 测量标板的照明条件
测量标板的亮度应使摄像系统产生可接受的输出信号水平,但不过曝。
C.2.2 测试过程
C.2.2.1 白平衡
同A.2.2.1
C.2.2.2 摄像系统取景
调整拍摄距离至需要的位置,记为测量工作距d0,并使测试标板居中。对于适配可目视观察内窥镜的摄像系统,d0为500mm,其他d0为设计工作距。对于可变焦的镜头,在最小焦距下测量。
C.2.2.3 摄像系统设置
摄像系统自带的图像压缩功能可能会显著地影响分辨率测量,部分摄像系统可通过按键选择是否开启图像压缩功能。摄像系统的所有设置值都可能影响测量结果,包括拍摄模式、测试距离等都应与测量结果一起报告。
C.2.2.5 采集图像
拍摄系统拍摄测试标板,用图像采集器采集并保存图像。
C.2.2.6确定奈奎斯特频率
若横向像素为n,则奈奎斯特频率为n/2(LP/PH).
C.2.3 结果处理
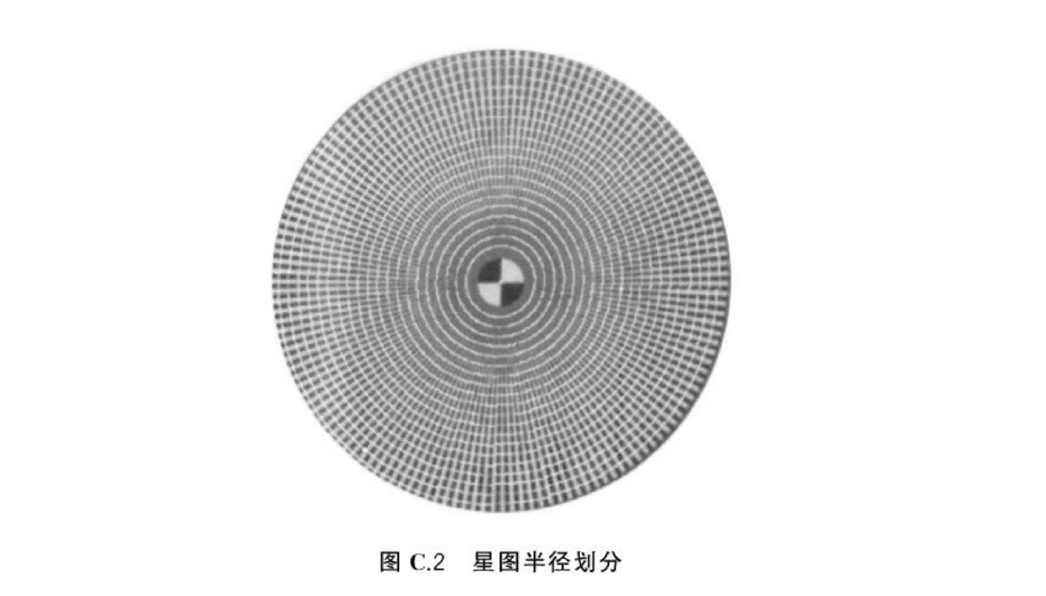
该星图被分成24个部分。在每一个确定的半径值上,搜索出距离该条半径最近的像素,存储数字值和角度(在改角度下找到该像素)。如果精确的地方没有像素,那么使用距离半径位置最近的像素值,而不是使用插值法(见图C.2)。这就使得结果中的误差比像素值插值法结果中的要小。计算出3个部分数据的平均值,从而最终得到8个部分的数据。
以下详细地描述了分析工作所采用的的步骤。
第1步:框选出包含整个星图的待分析区域。
第2步:进行由用户选定的星图分割。
第3步:沿着半径确定出像素位置(见图C.3),选择数字码值(见图C.4),并记录,按制造商规定的亮度光电特性相对函数(OECF的反函数)或数据列表计算得到输出亮度值。
第4步:重复第3步,以此来分析至少32个半径。


谐波西门子星图的强度如下:

式中:Φ0为初始相位,a为正弦波的基线值,b为正弦波的振幅,g为每周期的像素数,利用下式可以计算出每个像素的角度:

式中,x=0和y=0作为星图的中心。由于信号初始相位Φ0不定,用下式来取代式(C.1)。

其中

第5步:根据最小二乘法确定拟合后的正弦曲线。
第6步:从式(C.5)中计算出调制度,从而确定出正弦曲线的调制度。
第7步:得到各个方向的调制度与空间频率之间的函数关系,机位SFR
第8步:计算各个方向的SFR的平均值
第9步:对所选择的各种半径上的sfr的平均值以LP/PH(线对/像高)为横坐标,进行分段线性拟合,得到sfr值为50%和30%时的频率值。
第10步:将SFR值为50%和30%时的频率值折算成对应物方空间的角频率。
注:由于标板的对比度较高,故标板的调制度可作为1处理。
若采用其他等效正弦波测试标板,结果处理应参照上述方法等效进行。
5.5 静态图像宽容度试验方法
检査制造商提供的随附资料内容。
按照附录D规定的方法测量摄像系统的静态图像宽容度。
5.6 电气安全
应按照GB 9706.19规定的试验方法进行。
正印科技提供内窥镜成像质量全套测试设备及应用解决方案
支持3D,4K,荧光,光学镜,电子镜,内窥镜成像系统,内窥镜冷光源,内窥镜光纤,摄像头模组
联系我们:
如果您有什么问题或想要了解的讯息,欢迎与我们留言,也可邮件咨询: sales@colorspace.com.cn,分享您的看法或提出您的问题!

Was this helpful?
7 / 0

[…] 电子内窥镜· YYT/1603:医用内窥镜 内窥镜功能供给装置摄像系统· YY0068.1:医用内窥镜硬性内窥镜第1部分:光学性能及测试方法· YY […]
[…] 电子内窥镜· YYT/1603:医用内窥镜 内窥镜功能供给装置摄像系统· YY0068.1:医用内窥镜硬性内窥镜第1部分:光学性能及测试方法· YY […]
[…] 电子内窥镜· YYT/1603:医用内窥镜 内窥镜功能供给装置摄像系统· YY0068.1:医用内窥镜硬性内窥镜第1部分:光学性能及测试方法· YY […]