简介
噪声是图像密度的随机变化,在胶片中可见颗粒,在数字图像中可见像素级变化。它是一个关键的图像质量因素;几乎与清晰度一样重要。它与动态范围密切相关–相机能够以合理的良好信噪比(SNR)和对比度再现的亮度范围。由于它产生于基本物理学–光的光子性质和热的热能–它将永远存在。好消息是,在数码相机中,尤其是具有大像素(4微米见方或更大)的数码单反相机中,噪声可以非常低,往往是难以察觉的低。但是,在具有微小像素的紧凑型数码相机中,噪音可能变得很难看,特别是在高ISO速度下,降噪软件可能有明显的副作用。
在大多数情况下,噪音被认为是质量的下降。但有些黑白摄影师喜欢它的图像效果。许多人喜欢35毫米Tri-X胶片。(胶片颗粒与数字噪声有非常不同的统计数据–它是乘法的,而不是加法的,其光谱取决于密度)。点彩画家,最引人注目的是乔治-修拉(George Seurat),用手从 “噪音”(色彩斑点)中创造出图像;这项任务今天可以通过Photoshop插件在几秒钟内完成。但总的来说,大多数摄影师,特别是彩色和大画幅摄影师,不喜欢噪声是有道理的。噪点是由几个Imatest模块测量的。颜色/色调互动、颜色/色调自动、eSFR ISO、Colorcheck、Stepchart,以及在有限程度上的SFR、SFRplus和Uniformity。前三个模块–颜色/色调互动、颜色/色调自动和eSFR ISO–有最全面的噪声测量。
噪声测量通常指RMS(均方根)噪声,它与信号S的标准偏差相同。
RMS噪声=N=σ(S),其中σ表示标准偏差。
S可以是几个通道中任何一个的信号。R、G、B、Y(亮度,通常为0.2125 R + 0.7154 G + 0.0721 B),或一个衍生通道,如R-Y或B-Y(均用于色度噪声)。L*,a*,b*,或其他。

信噪比(SNR)是一种来自噪声的测量,通常被认为比噪声本身更重要。它表示为一个简单的比率(SNR=S/N)或以分贝表示,SNR(dB)=20 log10(S/N),这是电气工程师所熟悉的。在数码相机中,噪声由两部分组成:固定噪声(传感器暗电流噪声和热(电阻)噪声)和拍摄(光子)噪声,它随着撞击像素的平均光子数量的平方根而增加。
噪声测量
噪声测量最好是与感知的外观相关。
(在许多情况下)以原始场景为参照,这样测量就不会受到相机或RAW转换器的色调响应(伽玛,相当于对比度)的影响。
足够详细,以便能够准确评估传感器和相机的性能,并且简单到可以毫无困难地解释。
信噪比–由于噪声只有在与信号相关的情况下才有意义,所以通常会计算信噪比(SNR或S/N)。信噪比可以有很多定义,这取决于如何定义信号S。例如,S可以是一个单独的补丁像素水平,或对应于指定场景密度范围的像素差(1.45或1.5经常用于此目的)或低对比度的物体(对于对比度分辨率SNR)。每当讨论信噪比时,准确了解信噪比的定义是很重要的。信噪比可以表示为一个简单的比率(S/N)或分贝(dB),其中信噪比(dB)=20 log10(S/N)。倍增的S/N相当于增加6.02分贝的信噪比(dB)。由于这些要求可能有些矛盾,Imatest模块有几个噪声和信噪比测量,有些简单,有些详细。
颜色/色调互动、颜色/色调自动、步骤图和颜色检查包括以下噪声显示。
噪声是像素水平或曝光的函数,表示为像素,归一化为Stepchart的场景密度范围1.5(与GretagMacbeth ColorChecker的密度范围1.45相当)或ColorChecker的白-黑区域(第3行,补丁1-6;密度范围=1.45)对应的像素差。如果没有这个归一化,噪声是RAW转换器响应曲线的一个函数;它随着转换器的对比度增加。
像素,归一化为最大像素值:8/24位文件为255。
像素(8/24位文件的最大像素值为255)
f-stops(或EV或zone;曝光的两个系数),即参考原始场景。以f档测量的噪声与人类视觉密切相关。见下面的f档噪声。
作为一个简单(平均)数字的噪声
描述噪声的一个好的单一数字是Y(亮度)通道的平均噪声,以像素为单位(归一化场景密度差为1.5),如下图中的下图所示。代表图表密度大于1.5或小于0.1的最亮和最暗区域被排除在平均值之外。
信噪比或信噪比(dB)作为像素水平或曝光的函数,其中S是单个测试图表补丁的像素水平。
信噪比或信噪比(dB)作为一个简单的(平均)数字。
定义信噪比的一个好的单一数字是白-黑信噪比,SNR_BW,其中S是Colorcheck中GretagMacbeth ColorChecker(密度范围为1.45)中白色和黑色斑块之间的像素级差,或Stepchart中对应于图表(场景)密度差1.5的像素差。噪声N是在密度为0.7左右的灰色斑块中测量的。SNR_BW的开发是为了减少图像对比度(由图像处理产生,即应用伽玛曲线)对噪声测量的影响。
=20log10((–/))
imatest中的各种噪声计算(包括Stepchart和Colorcheck的所有内容)在下表中列出(更多内容会不时添加)。
| 1. | Noise vs. input density (RGB) Noise in pixels or % of maximum pixel level | 2. | 从像素水平的标准偏差(σ)得出的简单噪声或SNR。 |
| 2. | Signal/Noise (S/N) vs. input density (RGBY) The luminance (Y-channel) is used for S. | ||
| 3. | SNR (dB) vs. input density (RGBY) SNR (dB) = 20 log10(S/N). | ||
| 4. | Chroma noise vs. input density | 3. | 行业标准的色度噪声 |
| 5. | Chroma S/N vs. input density | ||
| 6. | Chroma SNR (dB) vs. input density | ||
| 7. | CIELAB (L*a*b*) noise | 3. | 实验性:似乎是有意义的,因为CIELAB在感知上是近似统一的,但在工业上没有吸引力。 |
| 8. | CIELAB (L*a*b*) S/N | ||
| 9. | CIELAB (L*a*b*) SNR (dB) | ||
| 10. | Noise vs. pixel (all patches) | 2. | 用于从RAW(未处理或最小处理)图像中描述传感器的特征。 |
| 11. | S/N vs. pixel (all patches) | ||
| 12. | SNR (dB) vs. pixel (all patches) | ||
| 13. | F-stop (scene-referenced) noise, including Dynamic Range results. | 2. | 用于动态范围的计算。在此定义。 |
| 14. | Scene-referenced S/N (ratio), including Dynamic Range results. | ||
| 15. | Scene-referenced SNR (dB), including Dynamic Range results. | ||
| 16. | ISO 15739 Visual noise vs. input density (L*u*v*) | V. | 来自ISO 15739:2013标准。包括观察条件。 |
| 17. | ISO 15739 Visual S/N vs. input density (L*u*v*) | ||
| 18. | ISO 15739 Visual SNR (dB) vs. input density (L*u*v*) | ||
| 19. | ISO 15739 Noise and Dynamic Range | 2. | 也来自ISO 15739:2013。完全不受视觉噪音的影响。 |
| 20. | ISO 15739 Signal/Noise (S/N) and Dynamic Range | ||
| 21. | ISO 15739 Signal-to-Noise Ratio (SNR) in dB | ||
| 22. | CPIQ Visual Noise (CIELAB) | V. | |
| 23. | CPIQ Visual S/N (CIELAB) | ||
| 24. | CPIQ Visual SNR (dB) (CIELAB) | ||
| 25. | YUV noise | 3. |
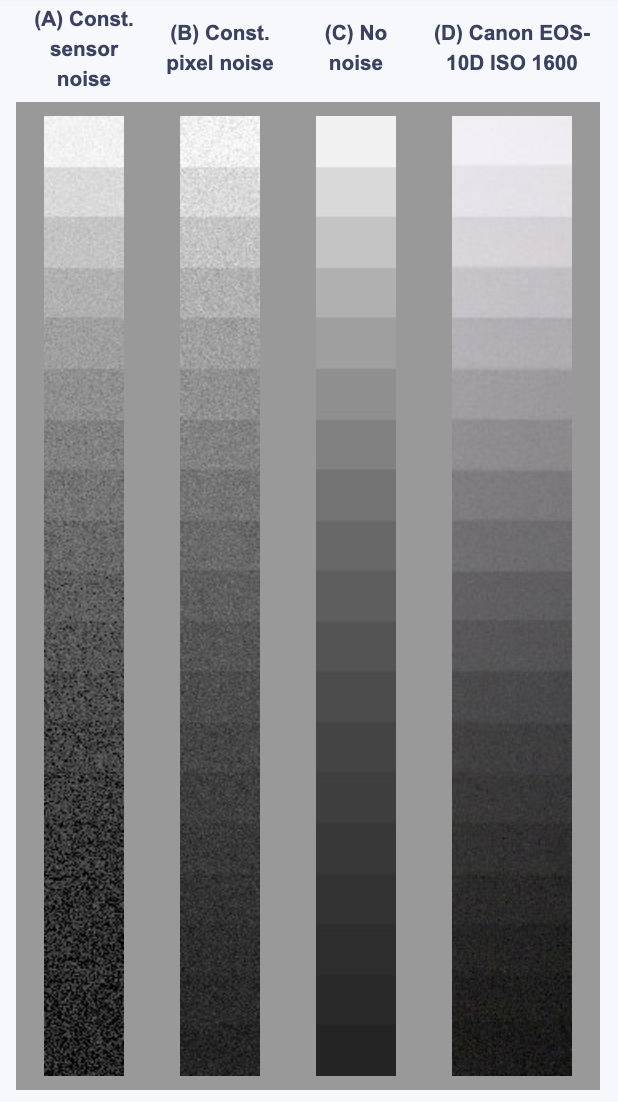
噪声的外观 噪声的外观在右边的步骤图中得到了说明。噪声通常以RMS(均方根)电压来测量。噪声的数学运算在本页底部的绿框中呈现。(A)-(C)栏中的阶梯图是模拟的。它们被假定为最小密度为0.05,密度步长为0.1,与柯达Q-13和Q-14相同。它们被编码为伽马=1/2.2,以便在伽马=2.2(视窗/互联网标准)下进行最佳观看。强烈的噪音–比你在大多数数码相机中发现的要多–已被添加到列(A)和(B)中。第(C)列是无噪音的。第四列(D)包含一个实际的Q-13阶梯图,由佳能EOS-10D在ISO 1600下拍摄:一个非常高的ISO速度。噪声是可见的,但对于如此高的ISO速度来说是很低的(毫无疑问,要感谢软件的降噪)。
(A)中的噪声在传感器内部是恒定的,即在伽马编码之前。当它被编码为伽马=1/2.2时,对比度,因此噪声,在黑暗区域被提高,在明亮区域被降低。安森美公司的出版物《CCD图像传感器噪声源》指出,这并不是一个现实的情况。传感器的噪声往往会随着亮度的增加而增加。(B)中的噪声在图像文件中是均匀的,也就是说,以像素为单位的数值是恒定的。因此,这个噪声必须随着传感器内部的亮度而增加(在伽马编码之前),因此比(A)更接近真实的传感器行为。除了最暗的区域外,噪声显得相对恒定,在那里它是不明显的。噪点在最亮的区域通常较低,那里的色调反应 “S “曲线叠加在伽玛曲线(或饱和度)上,降低了对比度,从而降低了噪点。由于这个原因,中间区域–噪音最明显的地方–被用来计算平均噪音:一个用于描述整体噪音性能的单一数字。我们省略了原始图表的密度(因此在未经处理的图像中显示密度)大于1.5或小于0.1的区域。
特征步骤图的结果如下。
列(B)。均匀像素噪声 该图像模拟了均匀的像素噪声(即图像文件中的恒定噪声,以像素为单位)。上面的图是相机的色调响应(或特性曲线)。它显示了伽马=1/2.2=0.4545的编码的预期理想响应:对数图的直线,斜率=0.4545。中间的图显示了以光圈(或EV或区域)为单位的噪声。在实际的传感器中,黑暗区域(对数曝光的大负值)的噪声增加得更快。下面的图显示了以像素级测量的噪声,归一化为密度范围为1.5的像素级差。它是相对恒定的,只显示统计上的变化,除了最亮的级别(在右边),因为一些样本在像素级别255处被剪掉,所以噪音减少了。下图还包含了用于描述整体噪声性能的单一数字:平均亮度通道噪声(Y = 5.59%,在靠近顶部的右边)。这个数字非常高;它对应着糟糕的图像质量。
这是模拟的均匀像素噪声的信噪比,单位是dB。由于伽马=2.2的编码,信噪比每增加一倍曝光量(0.301个密度单位)就会提高6.02/2.2=2.74分贝;大约每十年(1个密度单位)提高9.1分贝。

列(D)。佳能EOS-10D在ISO 1600下 与上图(B列的图像)不同,使用了佳能EOS-10D在ISO 1600时的真实数据。上图显示了叠加在伽马曲线上的轻微色调响应 “S “曲线(在这个对数图中是一条直线)。一些转换器的设置(如 “低对比度”)会导致一个更明显的 “S “曲线。中间的图显示了f-stop噪声,它在黑暗区域急剧增加。下面的图显示了归一化的像素噪声。它在黑暗区域增加。这种增加部分是由于高ISO的速度。数码相机通过放大传感器的输出来实现高ISO速度,这提高了噪声,特别是在黑暗区域。这条曲线在最低ISO速度下看起来是不同的:噪声值要低得多,并受到更多的统计变化的影响。
这是佳能EOS-10D在ISO 1600下的SNR,单位为dB。(这个显示选项是在Imatest 2.3.16中引入的)。信噪比每增加一倍曝光量(0.301个密度单位)就会提高6分贝;每十年大约提高20分贝(1个密度单位),这是对恒定传感器噪声的预期。(这个曲线在较低的ISO速度下会有很大的不同)。
噪声概述 噪声有两种基本类型。 时间性的。每次采集图像时随机变化的噪声。由Color/Tone Interactive、Color/Tone Auto、Colorcheck和Stepchart测量,所有模块使用两个相同的输入图像,或者Color/Tone Interactive和Color/Tone Auto使用多个图像(4-16个,推荐8个),如测量时间性噪声中所述。 空间或固定模式。由传感器非均匀性引起的噪声。传感器设计者在过去十年中已经大大减少了固定模式的噪声。 时间噪声可以通过信号平均来减少,这涉及到N个图像的总和,然后除以N。这是所有Imatest分析模块在选择几个图像文件时的一个选项(你也可以单独分析单个文件)。但由于时间性噪声是不相关的,所以噪声功率(而不是电压或像素水平)被加起来。由于电压与功率成正比,噪声像素水平(与噪声电压成正比)。4幅图像的信噪比提高2倍(6.01dB),16幅图像的信噪比提高4倍,等等。
有几个因素影响噪声。 像素大小。简单地说,像素越大,到达它的光子就越多,因此,在给定的曝光下,信噪比(SNR)越好。光子产生的电子数量与传感器面积成正比(以及量子效率)。噪声功率也与传感器面积成正比,但噪声电压与功率的平方根成正比,从而与面积成正比。如果你把一个像素的线性尺寸增加一倍,你的信噪比就会增加一倍。一个像素的电子容量也与它的面积成正比。这直接影响到动态范围。 传感器技术和制造。最大的技术问题是CMOS与CCD。我们在此不作详细讨论。在2000年以前,CMOS被认为具有更差的噪声,但现在已经改进到这两种技术可以相提并论的地步,只是在细节上有所不同。CMOS的成本较低,因为它很容易在传感器芯片上增加功能。技术还涉及到传感器设计和制造的其他方面,所有这些都会随着时间的推移而逐步改善。 ISO速度(曝光指数)设置。数码相机通过放大像素处的信号(连同噪音)来控制ISO速度。因此,ISO速度越高,噪音越大。为了充分描述一个传感器的特性,它必须在几个ISO速度下进行测试,包括最低和最高的速度。 曝光时间。昏暗光线下的长时间曝光往往比明亮光线下的短时间曝光更有噪音,也就是说,互惠原则对噪音的作用并不完美。为了充分描述一个传感器的特性,应该在长曝光时间(至少几秒钟)下测试。 数字处理。传感器通常有12位的模数(A-D)转换器,所以数字化噪声在传感器层面通常不是问题。但当图像被转换为8位(24位彩色)的JPEG时,噪声会略有增加。如果需要进行大量的图像处理(躲避和燃烧),噪声的增加会更严重(”带状 “会出现)。因此,通常最好转换为16位(48位彩色)文件。但输出文件的比特深度对(未经处理的)文件的测量噪声没有什么区别。 原始转换。无论你是否愿意,Raw转换器通常都会应用降噪(低通滤波)和锐化(见下面的噪声频谱);即使NR和锐化被关闭。这使得测量传感器的内在属性变得困难。 一般总结 Imatest在计算噪声(被测区域内像素水平的标准偏差)之前,从图像中减去渐进的像素水平变化。这就消除了可能由不均匀照明引起的误差。尽管如此,你应该注意尽可能均匀地照亮目标。 用于噪声测量的目标应该是光滑和均匀的–颗粒(在胶片目标中)或表面粗糙度(在反射目标中)不应该被误认为是传感器噪声。适当的照明(使用一个以上的灯)可以将表面粗糙度的影响降到最低。
F-光圈噪声、场景参考信噪比和动态范围
F-光圈噪声和场景参考的SNR
人眼对相对亮度差异有反应。这就是为什么我们认为曝光是以区域、f档或EV(曝光值)为单位的,其中一个单位的变化对应于曝光的2倍变化。
ΔL ≈ 0.01 L -或- ΔL/L ≈ 0.01其中ΔL是眼睛能分辨的最小的亮度差异。这个公式是近似的;由于来自明亮区域的视觉干扰(耀斑光),在场景和印刷品的黑暗区域,有效的ΔL往往更大。
用相对亮度单位表示噪声,如f档,比标准像素或电压单位更接近于眼睛的反应。以f-光圈为单位的噪声=Nf-光圈,通过将像素的噪声除以每f-光圈的像素数而得到。(出于习惯,我们使用 “f-stop “而不是 “zone “或 “EV”;任何一个都可以。) 请注意,1 f-stop = 0.301 光密度单位 = 6.02dB(分贝)= log2(亮度)。
还请注意,Nf-stop是以f-stop为单位的场景参考噪声(对数),必须与线性场景参考噪声Nscene-ref区分开来,后者的线性单位与亮度(场景信号)相同。

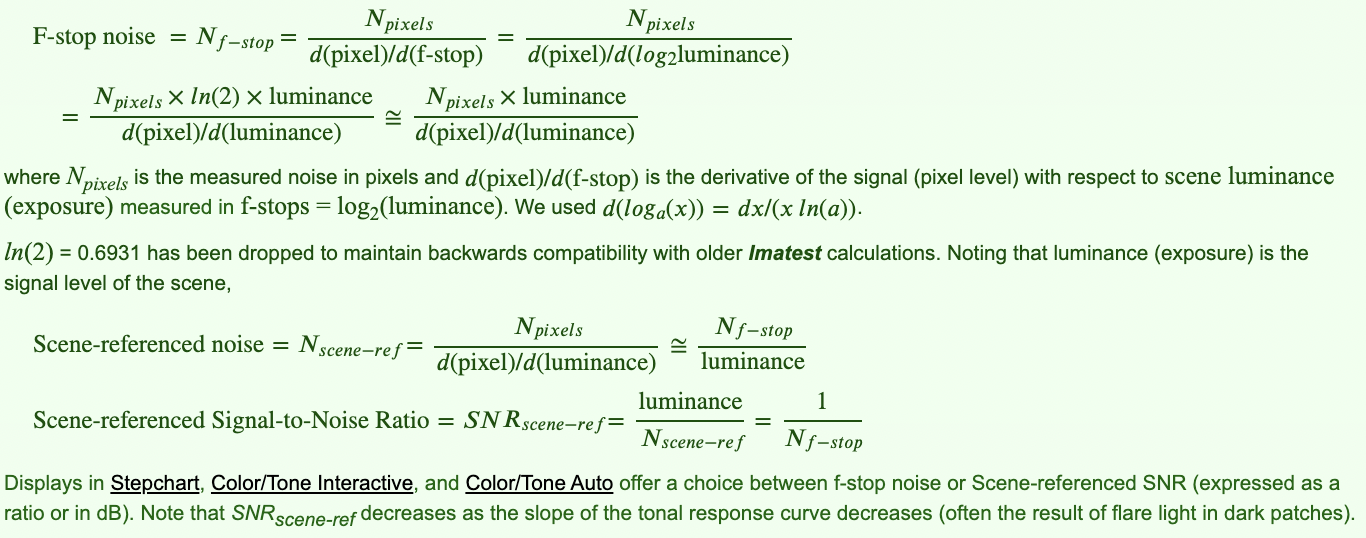
上面的右图说明了f档之间的像素间距(以及因此d(像素)/d(f档))是如何随着亮度的降低而减少的。这导致f-stop噪声随着亮度的降低而增加,在上面的数字中可见。
由于光圈噪声和场景参考信噪比是场景亮度的函数,基本上不受图像信号处理和耀斑光的雾化影响,它们是真实世界相机性能的优秀指标。它们是Imatest动态范围测量的基础。
Imatest有几种类型的动态范围计算,在此相互参照
| 从单一的透射性图表图像的动态范围。 | Stepchart, Color/Tone Interactive, Mutitest | 需要使用透射型图表,如Imatest 36-patch动态范围或HDR图表,因为反射型图表没有足够的色调范围。 |
| 多个(不同曝光)图像的动态范围 | Dynamic Range module | 使用CSV输出的颜色/色调自动步骤图,用于几个不同曝光的图像。通常与反射式图表一起使用,但也可以使用透射式图表。 |
| ISO 15739动态范围,来自密度≈2的灰阶 | Color/Tone Interactive, Color/Tone Auto, eSFR ISO | 从密度≈2的单个灰阶推算出动态范围。 |
| 原始传感器动态范围 | Color/Tone Interactive, Color/Tone Auto | 将原始数据与EMVA 1288标准中的方程式相匹配,然后推算出DR。测试图表不一定要有和DR一样大的音调范围,但建议使用音调范围≥3的透射型图表。 |
联系我们
如果您有什么问题或想要了解的讯息,欢迎与我们留言,也可邮件咨询: sales@colorspace.com.cn,分享您的看法或提出您的问题!

Was this helpful?
8 / 2