01| 标准范围
本标准规定了车载视频行驶记录系统的要求及试验方法。
本标准适用于M1类车辆使用的车载视频行驶记录系统(以下简称系统),其他类车辆使用的系统可参照本标准执行。
03| 术语定义
下列术语和定义适用于本文件。
3.1 车载视频行驶记录系统 on-board driving video recording system;DVR
安装在车辆上,以视频流方式显示、记录和存储车辆行驶前方影像,并且记录和存储的视频数据可被读取的系统。
3.2 帧率 frame rate
单位时间产生完整图像的画面数。
注:单位时间对视频信号空间行的全部扫描数,单位为帧/秒。
3.3 有效像素 effective pixel
电子影像传感器中能进行有效光电转换并输岀影像信号的像素。
3.4 视场角 field viewing angle
在摄像设备中,以摄像设备的镜头中心为顶点,被测目标的物像可通过镜头最大范围的两条边缘构成的夹角。
3.5 信噪比 signal noise ratio
视频信号的大小与噪声信号(无用信号)大小的比例。
SNR(dB)=20lg(Si/Ni)
式中:Si——色块i的信号(平均像素亮度值);
Ni——色块i的噪声值(像素亮度值的标准差)。
注:单位为dB。
3.6 动态范围 dynamic range
摄像设备能够记录的从最黑到最白之间的最大影调范围。
注:动态范围越大说明拍摄的影像层次越分明,所有超出动态范围之外的曝光值都记录为黑或白。它实际上描述了摄像设备记录影像灰阶等级的能力,可用灰阶测试图卡的灰阶级数表达。
3.7 自动增益控制 automatic gain control
放大电路的增益自动地随信号强度而调整的自动控制方法。
3.8 白平衡 white balance
照相摄像设备对于不同光源照明条件下被拍摄物体所得到的影像还原,具有与人眼在相同照明条件下观察被拍摄物体相符合的色彩再现。
3.9 色彩还原 color rendition
将描述景物色彩空间坐标的图像数据,映射为与输出相关的描述照片色彩空间坐标的图像数据。
注:色彩还原通常由一个或多个针对输入和输出观察条件的差别所进行的补偿构成,因此要将描绘景物颜色的尺度和色域映射在照片的动态范围和色域上,并使用偏好调整。简单地说即成像设备真实重现被摄物体颜色的能力。
3.10 炫光 glare
视野中由于不适宜的亮度分布,在空间或时间上存在极端的亮度对比,以致引起视觉不舒适和降低物体可见度的视觉条件。
3.11 鬼像 ghost
产品在使用环境中存在高亮度目标源,在镜头内部快速反射,最终在图像上形成的附加像。
3.12 畸变 distortion
拍摄画面相对于被拍摄图案的几何变形。
注:如所拍摄画面大于被拍摄图案时为枕形畸变,反之为桶形畸变。
05| 要求
5.4 图像性能
5.4.1 帧率
按照6.6.1进行测试,系统的帧率应不小于25帧/s。
5.4.2 有效像素
按照6.6.2进行测试,系统的有效像素应不低于200万(1920×1080像素点),图像信号应正常,不得有信号丟失的现象。
5.4.3 视场角
按照6.6.3进行测试,并将视场角记录在试验报告中。
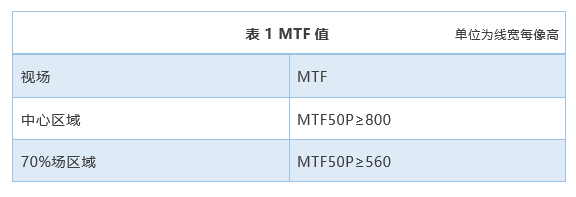
5.4.4 MTF值
按照6.6.4进行测试,系统的MTF值应符合表1的规定。
5.4.5 信噪比
按照6.6.5进行测试,系统的SNR应不小于30dB。
5.4.6 动态范围
按照6.6.6进行测试,系统的动态范围应不小于85dB。
5.4.7 最高照度
按照6.6.7进行测试,图像应显示正常,无滚屏、花屏、水波纹、偏色、画面泛白等现象。
5.4.8 最低照度
按照6.6.8进行测试,MTF值应不低于表1的60%,不能有干扰条纹,水波纹等现象。
5.4.9 自动增益控制时间
按照6.6.9进行测试,不同光源切换后自动增益控制的响应时间应不大于1s。
5.4.10 白平衡
按照6.6.10进行测试,拍摄马克贝斯24色彩色试验图卡的中性色块不能有明显色差,图像不能产生偏色现象,24色彩色试验图卡第#21,#22两块(中间两块)灰度卡HSV中的色饱和度(S)值应小于15%。
5.4.11 色彩还原
色彩还原基于CIE 1976色度空间色调角。按照6.6.11进行测试,各色块与白色块的实测色度误差的欧几里得距离应不小于0.02。
其色调角应满足以下要求:
1) 红色块的坐标应在(0°,44.8°)或(332.2°,360°)范围内;
2) 绿色块的坐标应在(96.6°,179.9°)范围内;
3) 蓝色块的坐标应在(209.9°,302.2°)范围内;
4) 黄色块的坐标应在(44.8°,96.6°)范围内。
5.4.12 炫光
按照6.6.12进行测试,当镜头在极端亮光照射下,所产生的光斑面积应不大于显示面积的25%。
5.4.13 鬼像
按照6.6.13进行测试,鬼像与视场的面积占比应满足以下要求:
1) 若鬼像与原像的峰值亮度比值大于50%,鬼像与视场的面积占比应小于1%;
2) 若鬼像与原像的峰值亮度比值大于30%且不大于50%,鬼像与视场的面积占比应不大于8%;
3) 若鬼像与原像的峰值亮度比值不大于30%,鬼像与视场的面积占比不作要求。
5.4.14 畸变
按照6.6.14进行测试,系统的畸变量不得大于30%。
06| 试验方法
6.6 图像性能试验
6.6.1 帧率
DUT以工作模式B1,按照QC/T 1128-2019中6.3.2.1方法进行试验。
6.6.2 有效像素
DUT以工作模式B1,按照QC/T 1128-2019中6.3.2.2方法进行试验。
6.6.3 视场角
DUT以工作模式B1,按照QC/T 1128-2019中6.3.2.3方法进行试验。
6.6.4 MTF值
DUT以工作模式B1,按照QC/T 1128-2019中6.3.2.4方法进行试验。
6.6.5 信噪比
DUT以工作模式B1,按照QC/T 1128-2019中6.3.2.5方法进行试验。
6.6.6 动态范围
DUT以工作模式B1,按照QC/T 1128-2019中6.3.2.6方法进行试验。
6.6.7 最高照度
DUT以工作模式B1,按照QC/T 1128-2019中6.3.2.7方法进行试验。
6.6.8 最低照度
DUT以工作模式B1.按照QC/T 1128-2019中6.3.2.8方法进行试验。
6.6.9 自动增益控制时间
DUT以工作模式B1.按照QC/T 1128-2019中6.3.2.10方法进行试验。
6.6.10 白平衡
DUT以工作模式B1.按照QC/T 1128-2019中6.3.2.11方法进行试验。
6.6.11 色彩还原
DUT以工作模式B1.按照QC/T 1128-2019中6.3.2.14方法进行试验。
6.6.12 眩光
DUT以工作模式B1.按照QC/T 1128-2019中6.3.2.15方法进行试验。
6.6.13 鬼像
DUT以工作模式B1.按照QC/T 1128-2019中6.3.2.16方法进行试验。
6.6.14 畸变
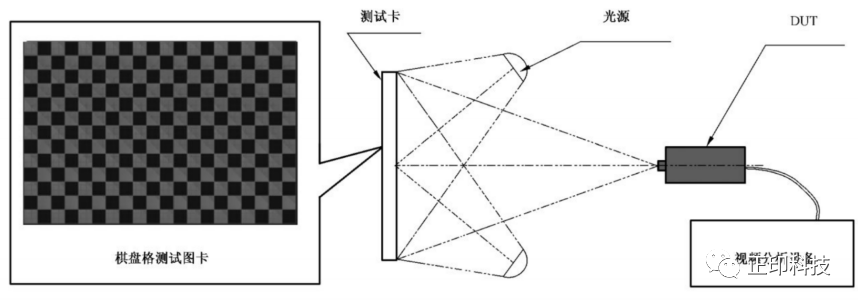
参考图4所示布置测试设备,DUT以工作模式B1进行测试。
测试程序如下:
1) 桶形畸变:调整DUT和测试卡之间的位置,参考图5,使拍摄的棋盘格画面的横向、纵向边沿线分别与显示画面的横向、纵向边框中点相切;
2) 枕形畸变:调整DUT和测试卡之间的位置,参考图6,使拍摄的棋盘格画面的横向、纵向对角与显示画面的对角相接;
3) 按照式(1)计算畸变量:
式(1):
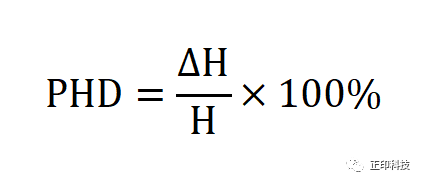
式中:∆H——图像边缘线的最大垂直偏移量,单位为毫米(mm); H——图像最大高度,单位为毫米(mm)。
 | 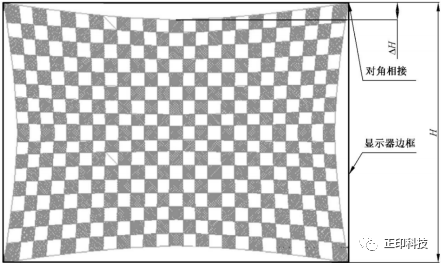 |
| 桶形畸变量计算图 | 枕形畸变量计算图 |
附录C| 动态图像质量评价
C.1 图像质量评价分级
系统的图像质量评价等级为表C.1。

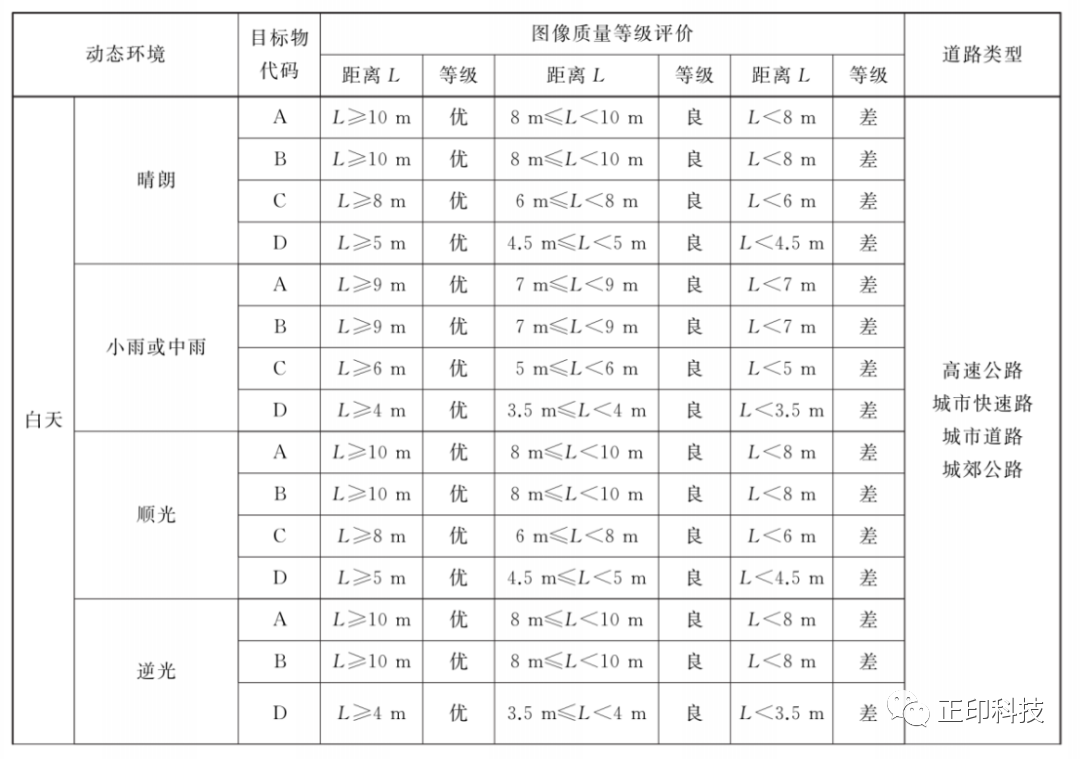
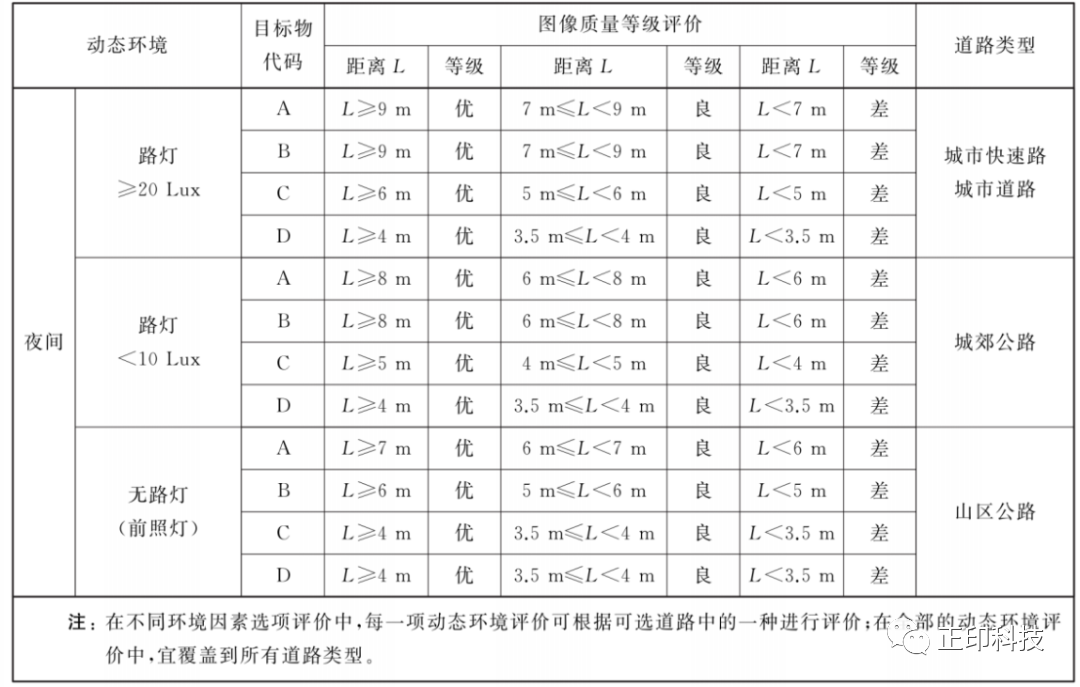
C.2 动态环境下图像质量等级评价
车辆行驶在不同环境下的图像质量等级评价为表C.2。
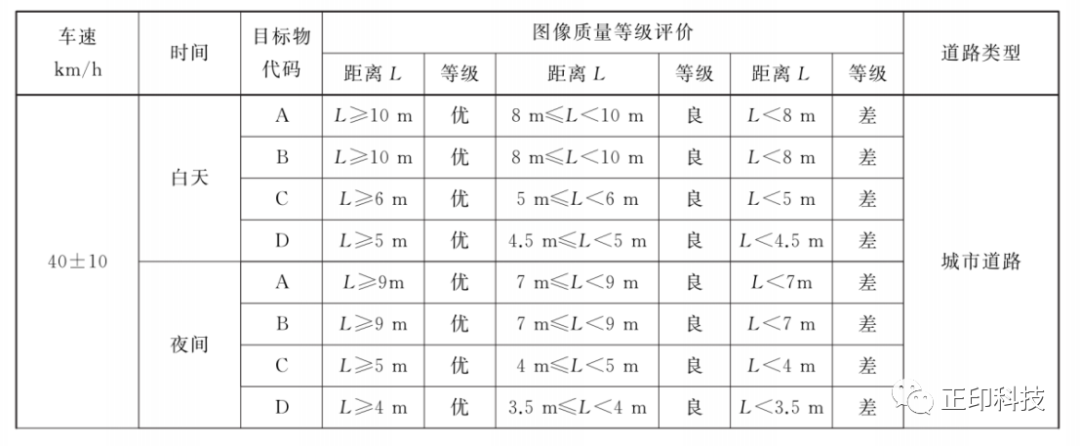
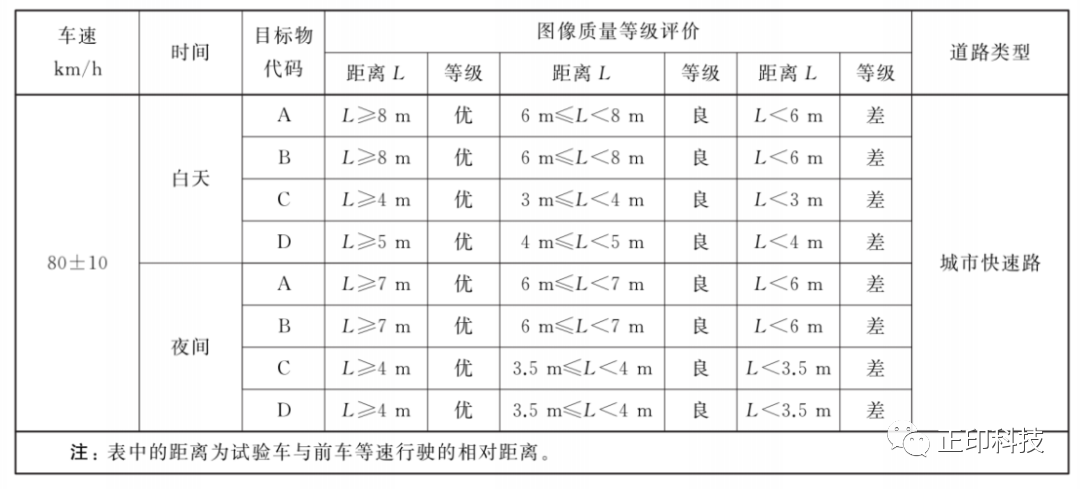
C.3 动态车速下图像质量等级评价
车辆行驶在不同车速下的图像质量等级评价为表C.3。
表C.3动态车速下的图像质量等级评价
C.4 动态图像质量等级综合评价结论
C.4.1 动态图像质量等级综合评价
根据表C.2动态环境和表C.3车速、时间,逐项进行动态图像质量等级综合评价。系统的动态图像质量等级综合评价分为以下等级:
优——表C.2和表C.3中各项等级评价均为优;
良——表C.2和表C.3中各项等级评价为优和良或全部为良;
差——表C.2和表C.3中只要有一项等级评价为差。
C.4.2动态图像质量等级综合评价结论
系统的动态图像质量等级综合评价结论宜达到C.4.1中的优或良。
C.4.3 动态图像质量等级综合评价报告
系统的动态图像质量等级综合评价报告中记录的内容包括:
1) 系统的名称、系统型号或代码、制造商;
2) 搭载系统的车型名称、车型型号、VIN、制造商;
3) 表C.2和表C.3中的时间、环境、气象、道路、路灯照度和分项图像质量等级等信息;
4) 动态图像质量等级综合评价结论。
联系我们:
如果您有什么问题或想要了解的讯息,欢迎与我们留言,也可邮件咨询: sales@colorspace.com.cn,分享您的看法或提出您的问题!

Was this helpful?
5 / 0
