发布时间:2025年8月5日
机器人视觉是智能系统获取外界信息的重要通道,其可靠性直接关系到运动决策与安全。《GB/T 45579—2025 机器人智能化视觉评价方法及等级划分》给出了面向工业机器人、个人/家用服务机器人、公共服务机器人和特种机器人的视觉评价框架。下面结合标准要点,简要的介绍机器人视觉评价体系,帮助企业理解该标准并开展测试实验室方案建设,正印科技将不仅帮助企业搭建多光谱照明环境、多传感器实时反馈和实验室硬件环境,还可以帮助企业搭建自动化、可视化的实验室控制及测试系统,数据库及报告系统。
评价体系总体原则
评价的核心是科学、透明和安全。标准要求评价过程公开透明,评价人员应向委托方说明测评要求和结果计算方法。为保证测试对象的安全和兼容性,被测机器人的视觉系统在安全、电磁发射和抗扰度方面需满足相关国家标准。

视觉智能等级划分
标准将视觉智能能力划分为五个等级(L1~L5),等级越高意味着视觉处理速度和安全能力越强。不同等级的关键指标示例如下:
| 等级 | 2D FPS范围 | 3D FPS范围 | 安全功能要求 |
|---|---|---|---|
| L1 | 10–15 Hz | 5–10 Hz | 具备视觉系统故障报警功能 |
| L2 | 15–30 Hz | 10–15 Hz | 故障报警响应时间≤1 s,无明显误报 |
| L3 | 30–45 Hz | 15–30 Hz | 可切换到备用视觉系统并生成故障报告 |
| L4 | 45–60 Hz | 30–45 Hz | 故障报警响应时间≤0.2 s,具备实时诊断功能 |
| L5 | ≥60 Hz | ≥45 Hz | 响应时间≤0.017 s,可有效防止欺骗攻击 |
达到对应等级的所有指标即可判定为该等级,否则视为未通过。由于表格信息较多,上表仅列出了帧率和安全功能部分,其他指标如姿态估计精度、识别准确率、测距精度等在后续各章节中说明。
数据集和测试集要求
数据集建设
- 按场景构建:数据集应基于机器人应用场景和任务需求建立。例如工业机器人关注缺陷检测、字符读取等,家用机器人关注家居识别、人员识别等。
- 划分比例:数据集应划分为训练集、验证集和测试集。数据量较少时可采用6∶2∶2;海量数据可采用99∶0.5∶0.5。
- 建设原则:强调多样性、独立性、代表性、合规性和持续更新。多样性保证覆盖各种场景;独立性避免重复采集同一场景;代表性确保数据分布与真实环境一致;合规性要求遵守法规和隐私政策;持续更新则适应技术进步。
测试集要求
- 安全和视角:测试集应符合《个人信息安全规范》的数据安全要求。根据不同机器人安装高度选取视角:扫地机器人离地5‑10 cm,物流机器人80‑150 cm,工业机器人20‑350 cm。
- 独立性与构建方式:测试集不得包含训练或验证数据,通常通过企业搭载的视觉传感器采集或与自建数据集按比例混合。
- 光照与分辨率:测试集需覆盖不同时间和光照强度,如室内光照需满足照明标准,室外包括晴天、背阴、阴天和夜晚;工业和特种机器人测试集分辨率≥512×512像素,家用和公共服务机器人分辨率≥1280×720像素。
- 样本数量与扩充:每一类样本数量不少于100,总样本数不少于2000。可采用旋转、切变、光照变换等方法进行扩充,并允许使用未标注样本和对抗性样本。标准对旋转、切变等扩充操作给出了推荐范围,例如旋转间隔不少于3°、切变角度±15°。
- 均衡性与标注:数据集应考虑各类别样本均衡,并且标注信息完备、准确。
测评环境与设备
- 环境条件:标准测评条件包括温度15‑35 °C、相对湿度30%‑70%、气压86‑106 kPa以及网络传输速率≥10 Mb/s、丢包率≤5%、时延≤10 ms。
- 照明条件:暗室条件要求背景照度低于显示屏黑场亮度的1/20,亮室条件通过增加直射光源模拟室内或日光照射。
- 设备配置:测评设备应经过计量校准,显示屏尺寸约85 英寸且分辨率不低于3840×2160;处理器主频≥3.6 GHz,内存≥16 GB,显存≥8 GB。另外还需要光谱辐射计、运动捕捉系统(捕捉速度≥2 m/s,位置精度≤0.3 mm,姿态精度≤1°)等仪器。
测评方法流程
确定测评方案
测评方案基于三步确定:首先分析机器人类型、应用场景和任务需求;其次进行风险分析,识别潜在风险和对抗攻击手段(如伪造图像);最后选择测评指标、测试方式和测评条件。测评方式可以选择播放测试集或使用实物样本。
构建测试集和任务样本
测评对象不同,对测试集内容也有差异。例如:
- 人体姿态估计:测试集应包含站立、坐姿、行走、跑步等姿态以及瑜伽、舞蹈等特殊动作;包含不同年龄、性别、身高、体型和着装的人员。
- 人脸识别:样本数据需符合公共安全标准;训练集一般每个个体提供两张不同条件的照片,标注好边界框、关键点和身份标签。
- 字符识别:测试集既包括印刷文字场景(卡证、票据、车牌、文档等),也包括手写文字场景,并涵盖不同拍摄角度、简繁体、中英文和特殊字符。
- 图像识别与物体识别:测试集应根据表 3~表 6所列的应用场景准备样本,例如工业场景的缺陷识别、家用场景的家具识别、公共服务场景的场景布局识别等。
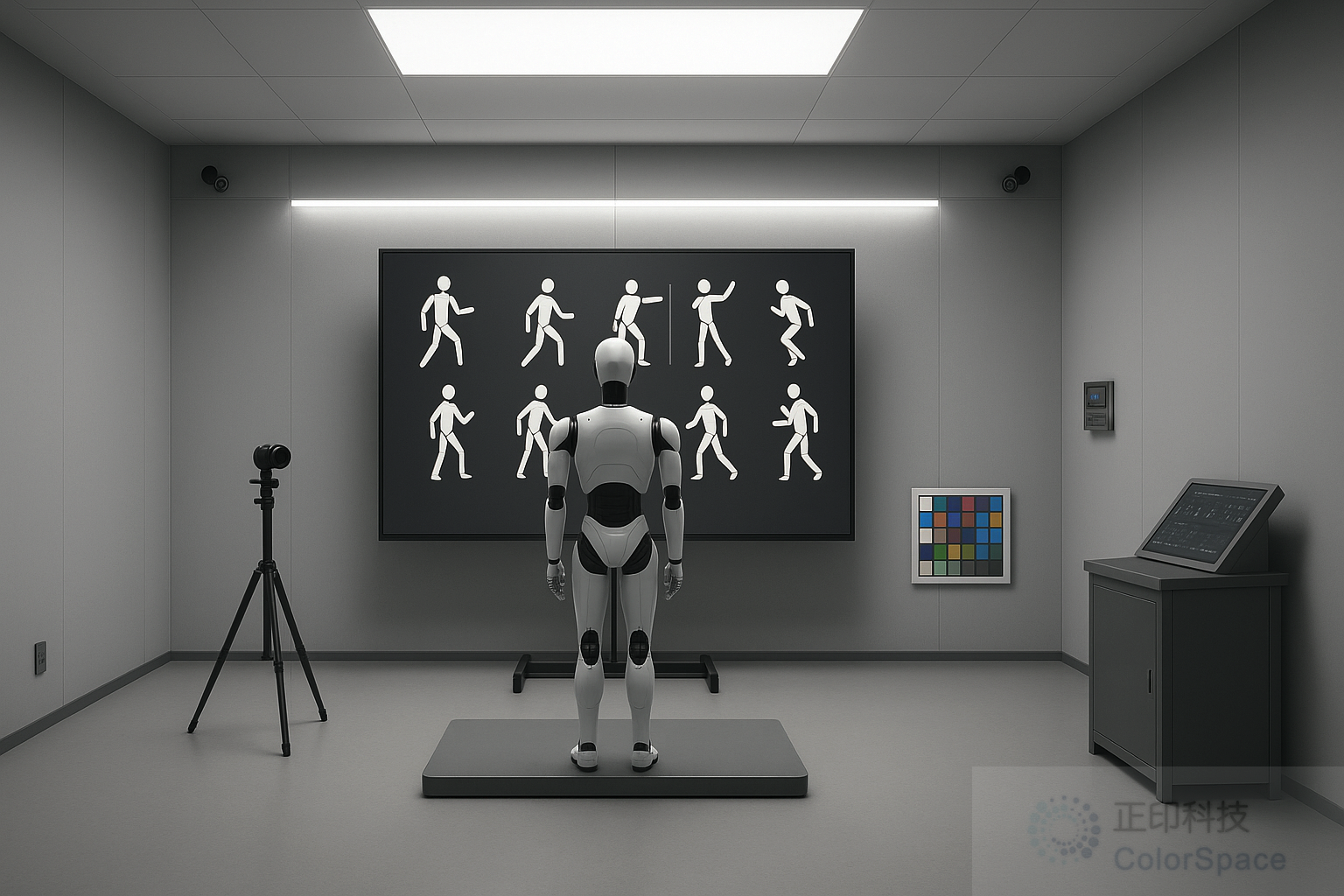
搭建测评环境
根据选定方案和第 6 章的环境要求搭建测评场地。被测机器人应放置在合适位置,显示屏或实物样本在可视范围内;标准照明条件下进行测试,并根据需要切换暗室和亮室照明。
指标测评
测评指标包括通用指标和任务指标:
- 处理速度(FPS):连接视觉测评系统,记录数据处理的开始和结束时间,计算每秒处理帧数FPS。这个指标反映了视觉系统对2D/3D图像的实时处理能力,也是划定L1~L5等级的重要依据。
- 安全功能:包括视觉系统故障报警、故障切换、报警响应时间和抗欺骗攻击能力。测评通过人为触发故障并记录警报响应时间。响应时间越短、能否切换到备用系统以及是否具备实时诊断功能等直接影响等级评定。
- 姿态估计:可以通过播放测试集或观察实物样本进行。播放测试集时,机器人面向显示屏,视觉测评系统实时记录其估计结果;使用实物样本时需借助运动捕捉系统同步记录真实姿态并计算偏差。结果以平均精度(AP)等指标表示。
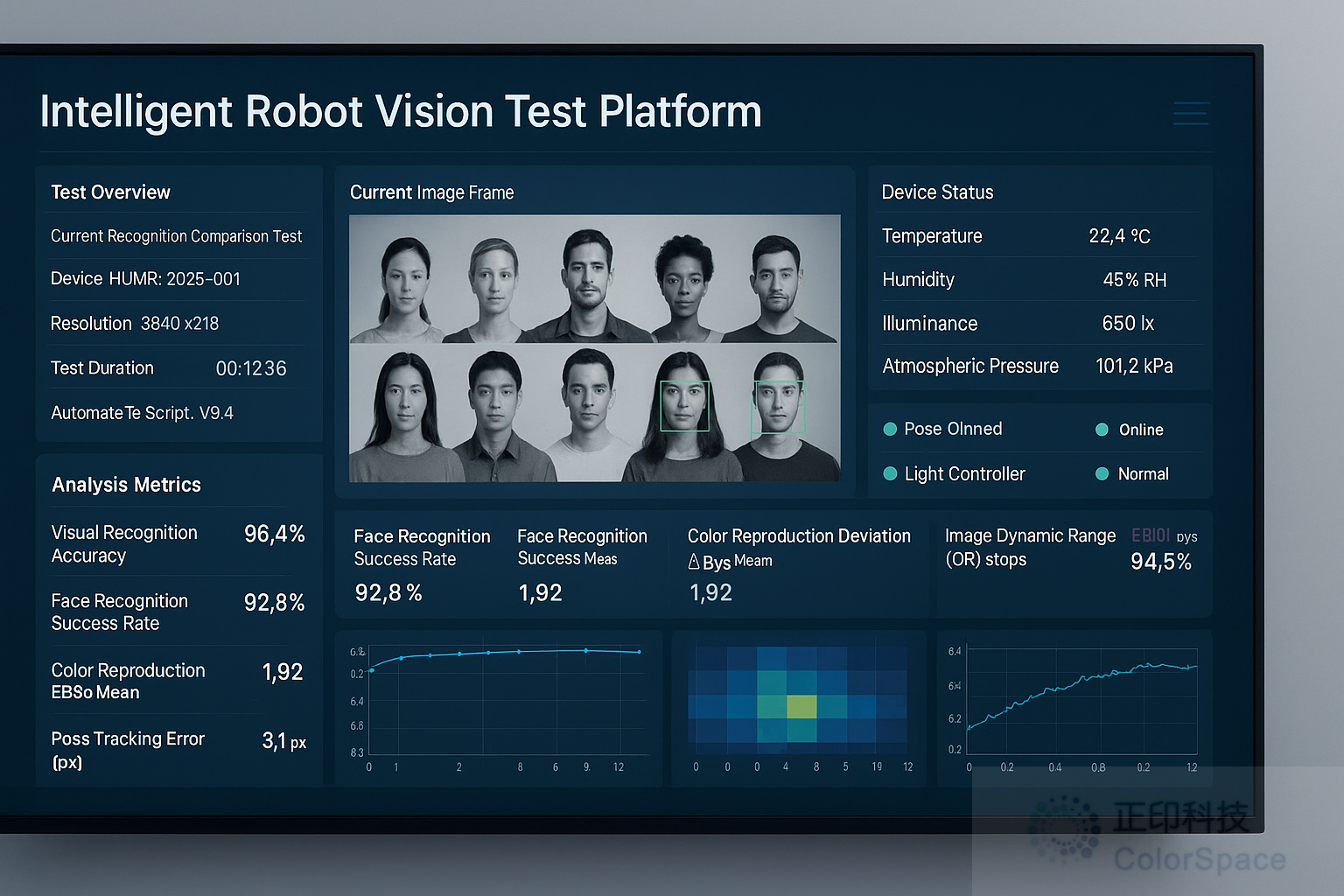
- 人脸识别:播放测试集时先提供训练集,每个个体两张标注好的照片;测试时机器人识别每一帧的人脸并计算准确率、宏平均准确率、微平均准确率、错误接受率和错误拒绝率等。实物测试时要求试验人员按指示转动脸部、眨眼或说话,改变光照条件再重复测试。
- 图像识别和物体识别:机器人播放测试集,测评系统实时记录识别结果,计算字符识别准确率、召回率、平均编辑距离、条码识别准确率以及物体识别的准确率、平均精度、交并比、召回率等。
- 测距精度和准测率:机器人在标准照明下对实物样本测距,循环10次,然后根据公式计算平均误差;准测率是测量成功的比例。
- 角度分辨率:通过让机器人旋转并观察漫反射板上点云变化求得水平和垂直角度分辨率。高精度转台的移动角度反映了视觉系统的角度分辨率,结果用于分级。
- 温度测量准确度和报警:针对带有红外传感器的视觉系统,标准规定了测温准确度、误报率、漏报率的计算方法。这里不再展开,但测评步骤类似,需准备标准黑体、假体攻击样本等。
结果计算与报告
结果计算依据第 8 章给出的公式,例如对象关键点相似度(OKS)和平均精度(AP)用于姿态估计,混淆矩阵用于计算分类准确率和召回率。评价人员将各项指标与等级标准对比,确定视觉智能等级,并形成评价报告。报告需包含测试条件、数据集信息、测评指标结果、等级判定及建议,整个过程公开透明。
典型应用与实验室方案优势
机器人视觉应用涉及多个领域。工业机器人利用视觉进行药品和零部件缺陷检测、码垛导航和焊接定位;家用服务机器人关注家具识别、家庭安全监控、老年人陪护等任务;公共服务机器人承担餐厅配送、商场导览、景区引导等工作;特种机器人用于建筑工地的目标识别、障碍物检测和环境理解。这些应用对应的测试任务在标准的表格中列出,企业可以根据自身产品选择相应项目进行评估。
为了帮助机器人企业快速完成标准化测评,我们的测试实验室提供一站式解决方案:
- 专业数据集构建:基于标准要求和企业应用场景建立多样化、代表性的训练和测试数据,确保数据安全和合规性。
- 标准化测评环境:实验室搭建了符合标准的暗室/亮室照明、可调节温湿度和网络条件的测试场地,并配备高精度运动捕捉系统、光谱辐射计和专业显示屏等仪器。
- 完整的评价流程:依据标准流程,帮助企业制定测评方案,开展测试、计算指标并生成报告。测评涵盖处理速度、安全性、姿态估计、识别精度、测距精度、角度分辨率、温度测量准确度等全方位指标。
- 技术改进建议:在评价报告中,我们不仅给出等级结果,还分析系统瓶颈并提出改进建议,助力企业迭代视觉算法和硬件。
结语
机器人视觉性能直接决定着机器人的安全性和智能程度。《GB/T 45579—2025》为机器人视觉评价提供了系统方法,涵盖数据集要求、测试环境、测评流程和结果判定。通过严格按照该标准进行评测,企业可以科学地定位视觉系统能力,客观地比较不同方案,并向客户和监管机构展示产品的可靠性和安全性。我们的测试实验室方案已经对标此标准,欢迎行业伙伴咨询合作,共同提升机器人视觉智能水平。
联系我们:
感兴趣的朋友,可在下方评论区留言,通过以下方式联系我们:发送邮件至 marketing@colorspace.com.cn,或拨打热线 400-886-3881!分享您的看法或提出您的问题!也欢迎点击表单填写您的需求。轻松一赞👍,快乐无限!喜欢就点个赞吧!

Was this helpful?
1 / 0

{kind=link}