发布时间:2025年1月9日
杂散光是指给光学成像系统带来随机性、不必要的光,比如常见的眩光,它会模糊图像较暗区域的细节,从而降低图像质量。然而,测量眩光却并非易事。现在,我们提出了一种新的测试方案,利用两张对比度分辨率测试卡的图像——一张未加遮罩,一张加了遮罩,来实现以下功能:

杂散光测量
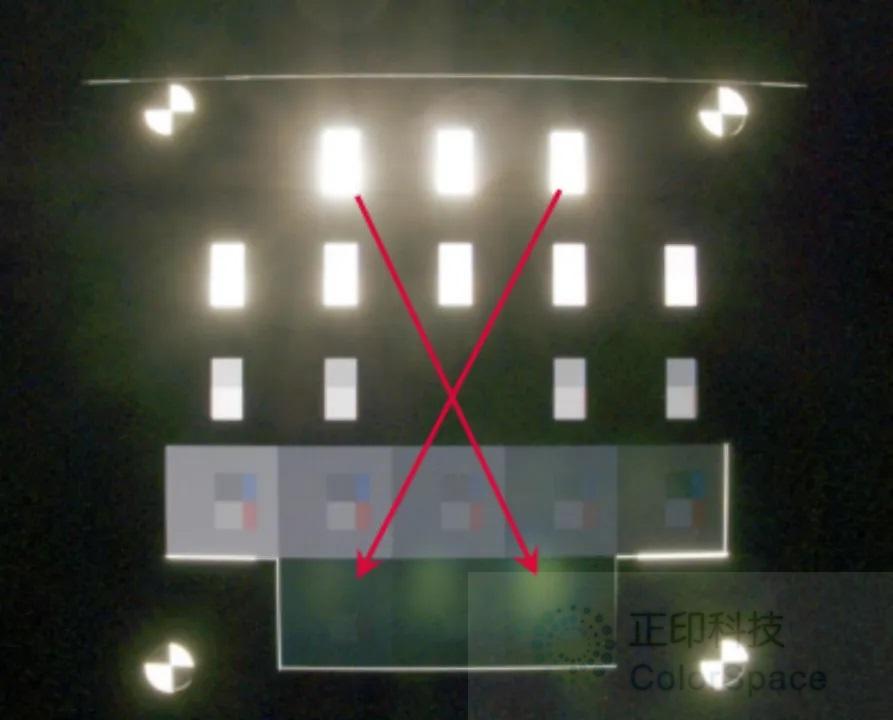
杂散光,这种来自相机视场内部或外部明亮区域的光,会让整个图像或部分图像变得模糊。它可能是面纱状的眩光,也可能会以“鬼影”的形式出现,使图像显得杂乱无章。
这种“鬼影”效果对于不同的镜头来说差异很大!眩光现象在画面中的表现通常从明亮的区域向外辐射出去,并随着距离的增加而逐渐减弱。
值得注意的是,眩光(Veiling glare)可能会误导性地改变动态范围的测量值,比如降低或提升真正的动态范围(DR)。在加遮罩且过曝、增亮的图像中,眩光现象尤为夸张,有时甚至可见鬼影(但请注意,此处分析的图像并非同一张)。
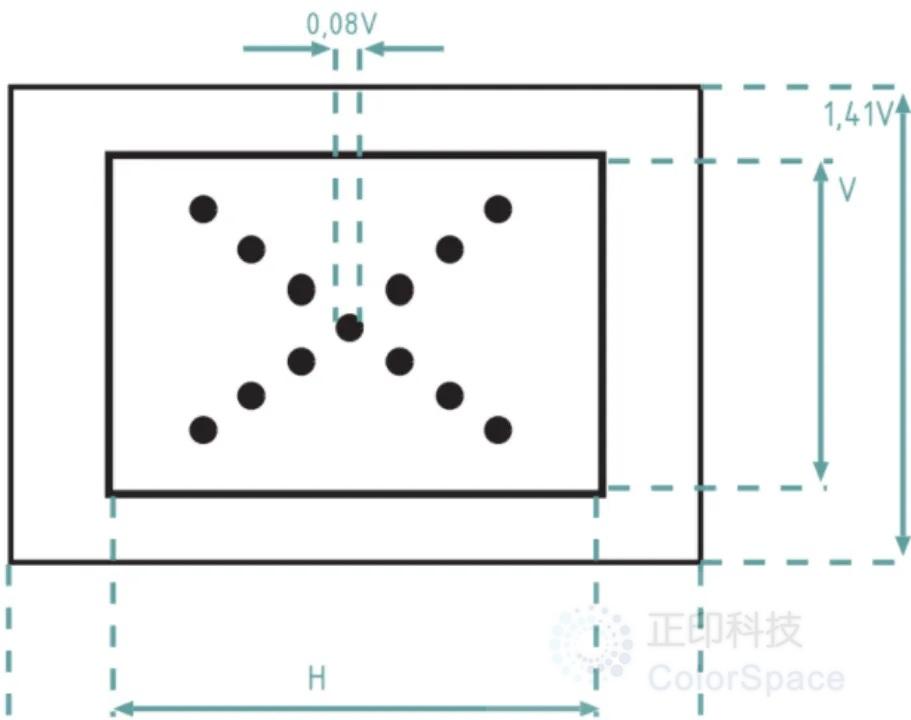
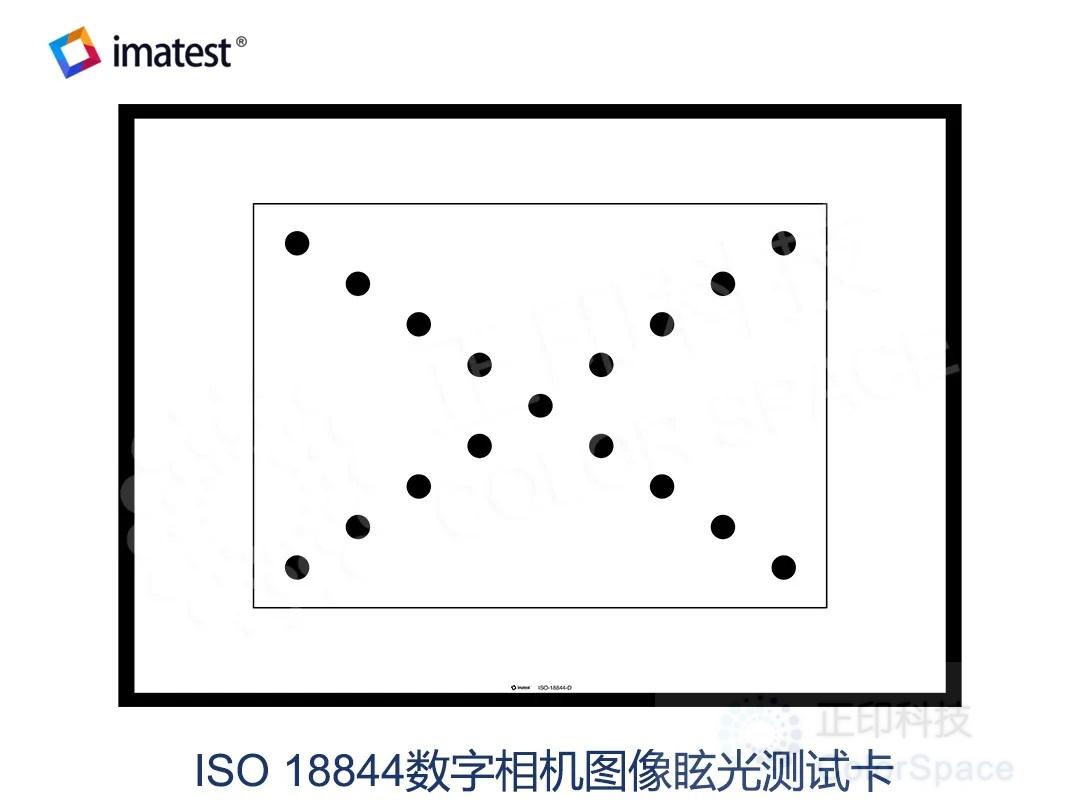
ISO 18844(传统眩光测量标准)
ISO 18844是衡量眩光的一个常用标准。目标区域由带有多个黑点的白色区域组成。在每个黑点(极大的光密度,如光阱)内部进行像素级别的测量,并根据伽马编码(如果有的话)进行校正,然后与周围的白色区域进行比较。然而,这种技术存在以下缺陷:
 |  |
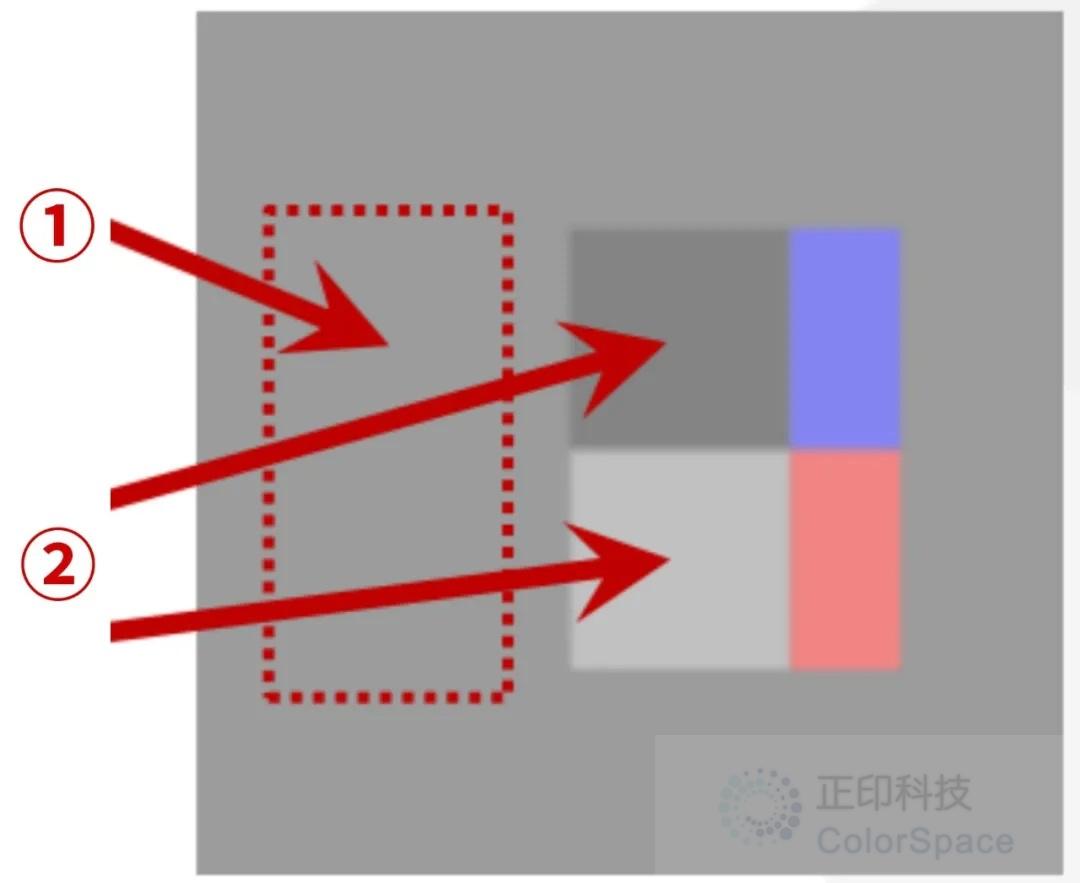 | 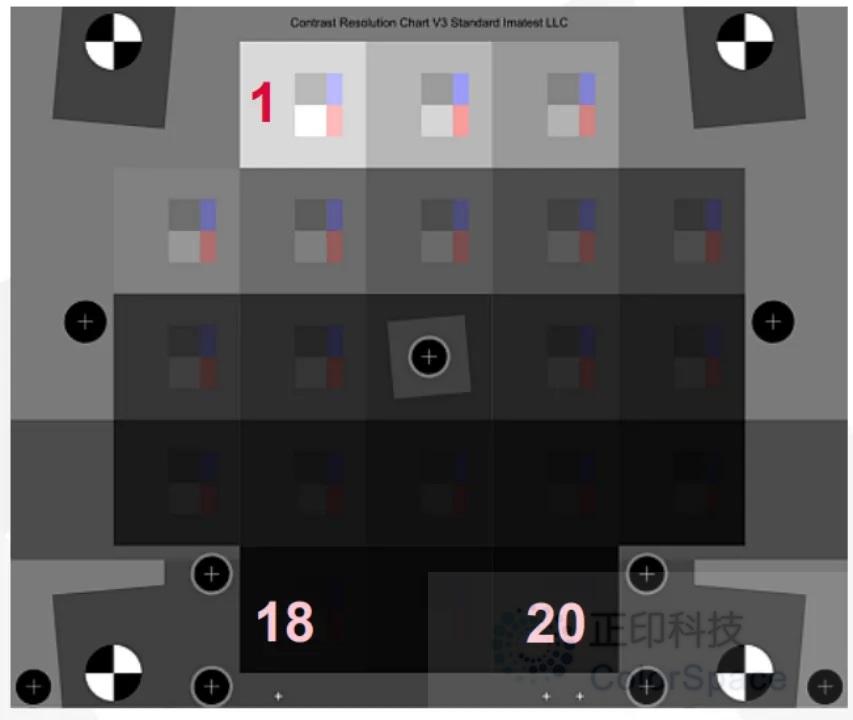 |
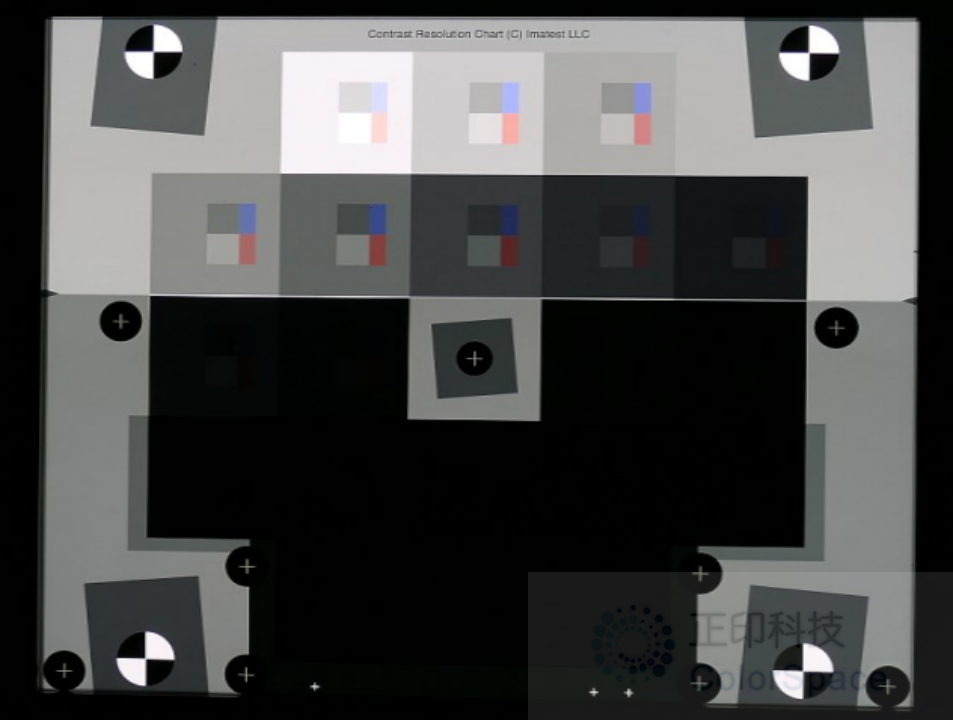
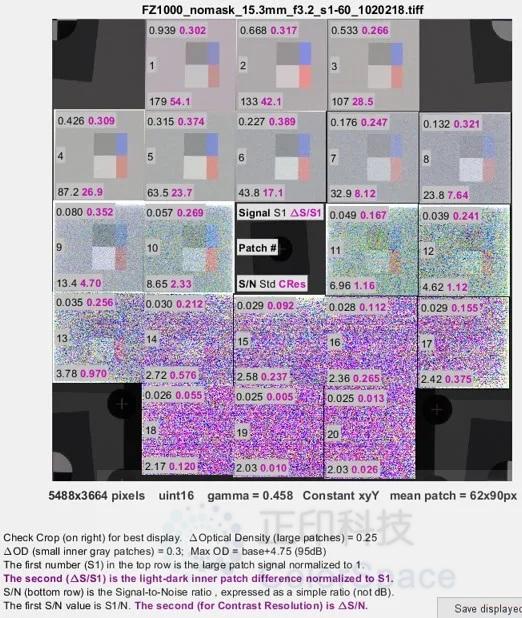
对比度分辨率测试卡是一种透射式的图卡,它主要从以下两个方面测量动态范围:
① 标准灰度区域
② 相邻小色块之间的差异,其中Δ(光学密度)= 0.3(即2:1的对比度)。这种设计有助于减少来自暗噪声、眩光、局部色调映射和线性偏差的虚假信号读数。大色块的密度增量为5 dB。测量眩光时,我们使用最后一行(18-20)灰阶块的平均值计算眩光,这些眩光主要来源于顶行的明亮灰阶区域。底行灰阶块的平均图卡密度比1号灰阶块低90 dB(即底部这些区域的平均光强是第1灰阶块的3.16×10⁻⁵倍)。
动态范围测量标准
动态范围(DR)被定义为图像在具有良好信噪比(SNR)和良好图像对比度情况下,能承受的曝光范围。
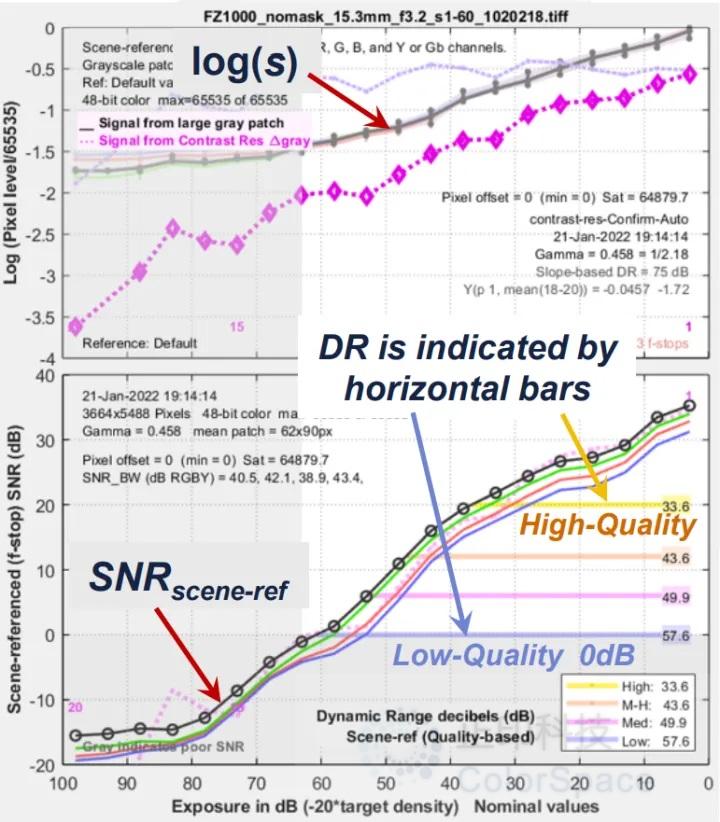
其中,信号s代表来自大色块的像素灰度值,图像
对比度c是log(s)的斜率。
$c = \frac{d(\log(s))}{d(\log(\text{exposure}))} \geq 0.075c_{max}$
由于杂光(眩光)的影响,暗区的对比度通常较低。在计算标准动态范围(DR)时,我们采用场景参考信噪比(Scene-referenced SNR),该值排除了对比度c的影响。
$N_{\text{scene-ref}} = \frac{N_{\text{pixel}}}{d(s)/d(\text{exposure})}$
$\text{SNR}{\text{scene-ref}} = \frac{s}{N{\text{scene-ref}}}$
关于图像对比度c,基于上面的公式,我们可以推断出它的实际意义——对比度是衡量图像亮度细节反差的一个重要指标。
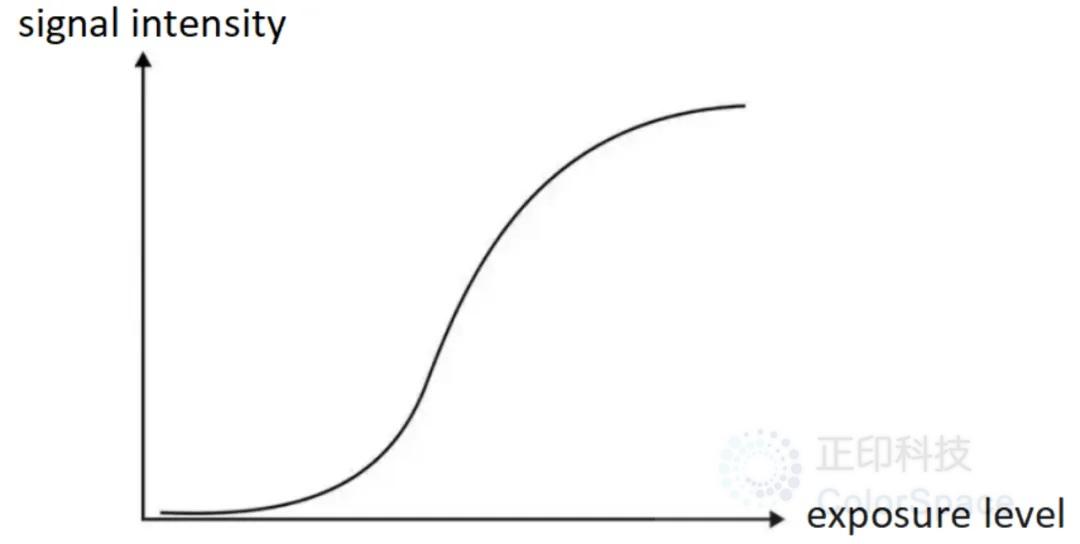
基于公式表示,对比度c与图像信号强度和曝光程度密切相关,那CMOS传感器的曝光程度和信号强度之前会有关联性,假如单一考虑曝光对信号强度的影响,持续增加曝光量,那信号强度会经历如下阶段:
- 低曝光:在较低的曝光水平下,信号强度(图像的亮度或灰度值)会随着曝光的增加而迅速增加。这是因为传感器开始接收到足够的光线,能够明显地响应光的变化。
- 线性区域:随着曝光的继续增加,信号强度的增长会进入一个近似线性的阶段。在这个阶段,信号强度与曝光量大致成正比,传感器的输出能够较好地反映光照变化。
- 饱和区域:当曝光达到某个阈值以上时,传感器的输出信号将趋于饱和,即使实际曝光继续增加,信号强度也不会有显著变化。在这个区域,图像的亮部可能会丢失细节,因为所有超出饱和点的亮度信息都被压缩到了最高值。
对于上述公式,对比度 c 描述的是图像信号对数变化率(亮度变化的速率)相对于曝光对数变化率(曝光变化的速率)的比值。换句话说,它描述了曝光变化对图像信号变化的影响程度。
那信号s我们用对数关系表述,与线性响应不同,对数响应意味着当光照强度增加时,感光元件的输出信号并不是按比例线性增加,而是呈现出一种递减的变化。也就是说,在非常亮的区域,信号的增加会显得缓慢,而在暗部,信号则会更敏感,增加得较快。这种响应方式与人眼对光线变化的感知方式更为接近,因为人眼对低光环境的变化更敏感,而对高光环境的变化相对不那么敏感。
曝光取对数关系的主要目的是为了更好地处理图像的动态范围,使得从暗部到亮部的过渡更加平滑,同时也能使图像的亮度变化更加符合人眼的感知方式。这样不仅提升了细节保留,也使得图像分析和后期处理变得更加精确和一致。
如果 c 值较大,意味着图像信号的变化较快,即在相同曝光变化下,图像亮度变化较大,对比度较高。高对比度的图像能更清晰地显示细节,尤其是在高光和阴影区域之间的过渡。如果 c值较小,意味着图像信号的变化较慢,即在相同曝光变化下,图像亮度变化较小,对比度较低。低对比度的图像可能显得较为平坦,细节不够清晰,尤其是在曝光极端(过暗或过亮)时。
动态范围和对比度分辨率
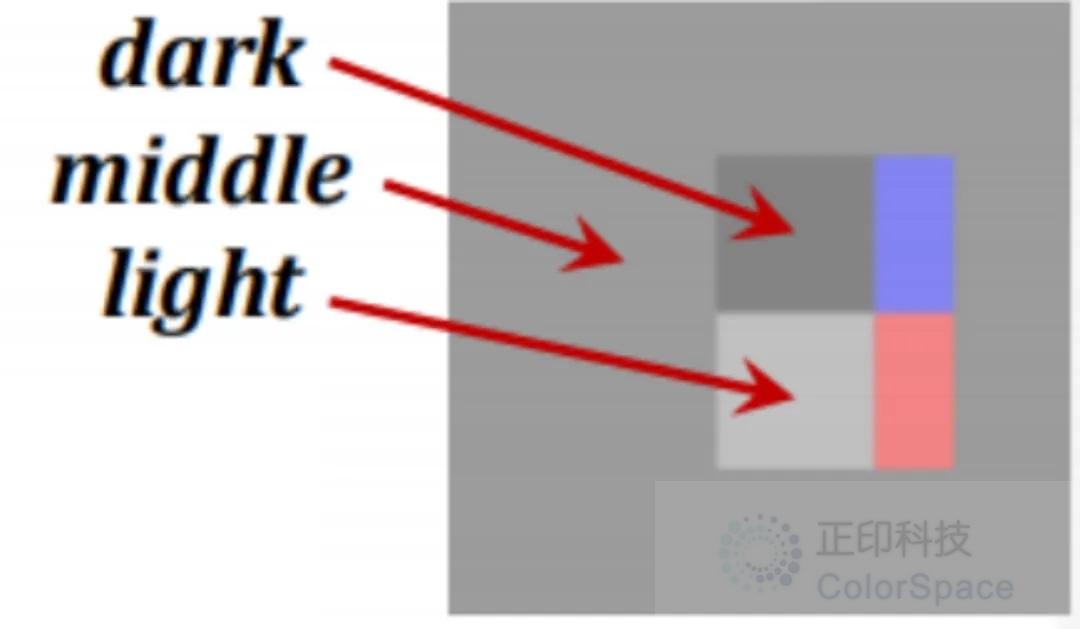
DRCR通过测量和分析图像中的像素级差异(Δs),能够更有效地识别出场景中低对比度的物体,从而提供比标准动态范围更准确的图像信息。
对比度分辨率信号:
$\Delta s = pixel\ level_{light} – pixel\ level_{dark}$
 | 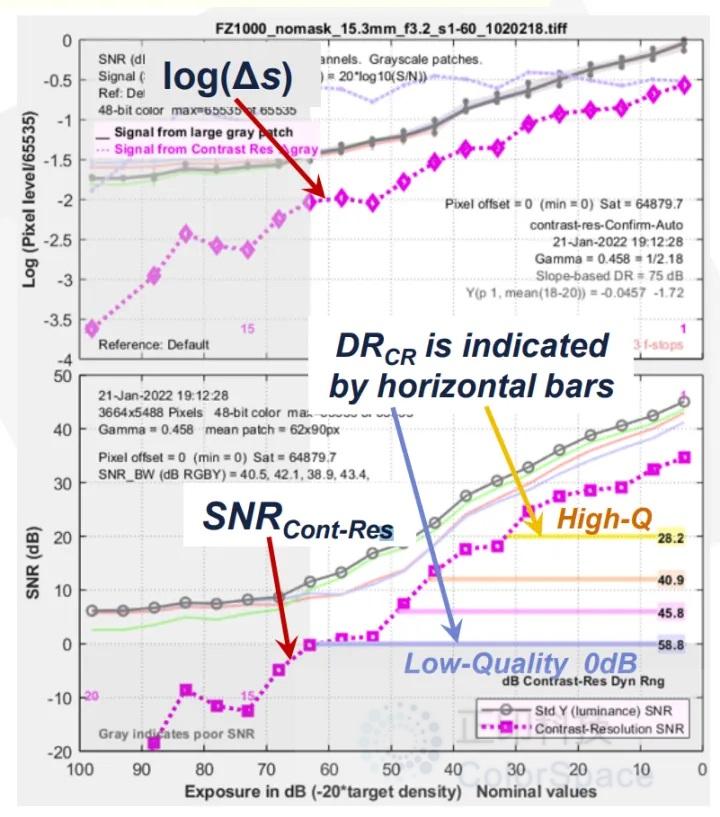 |
对比度分辨率信噪比(Contrast Resolution SNR)用于动态范围对比度分辨率(DRCR)的计算。
$SNR_{CR} = \frac{\Delta s}{N_{middle}}$
DRCR(动态范围对比度分辨率)以水平条表示:高质量(SNRCR = 20 dB)时为28.2 dB。DRCR通常与标准动态范围相似,但对于tone-mapped后的图片来说更为准确可靠。
动态范围的限制因素
动态范围可能受到信噪比(SNR)或眩光的限制,或两者的共同作用。以下是一些典型案例:
- 在线性传感器和高质量镜头的单反相机中,动态范围主要受信噪比(SNR)的限制。
- 在那些配备高动态范围(HDR)传感器且传感器性能优于镜头的相机中,动态范围可能受到眩光的限制。这种情况下,阴影区域可能会变得模糊不清。
值得注意的是,高动态范围(HDR)传感器(其性能受眩光限制)在汽车行业的应用日益广泛,因此其DR的测试方法和准确些一直备受关注。
信噪比SNR表现
对比度分辨率测试卡能够显示具有相同亮度水平(xyY中的Y值)的大色块。图中的大色块表示不同的亮度级别,这些块在同一亮度水平上显示,帮助评估图像传感器在不同亮度条件下的性能。信号可见度在信噪比(SNR)和对比度较低的地方会下降。
SNR(standard) 和 SNRCR (ratio; not dB) 是基于信号S和ΔS:
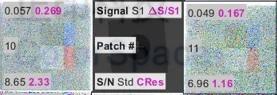
当SNR过低时,图像会淹没在噪声中;而当对比度过低时,图像则会显得模糊不清。
从两张图像中测量眩光及其影响
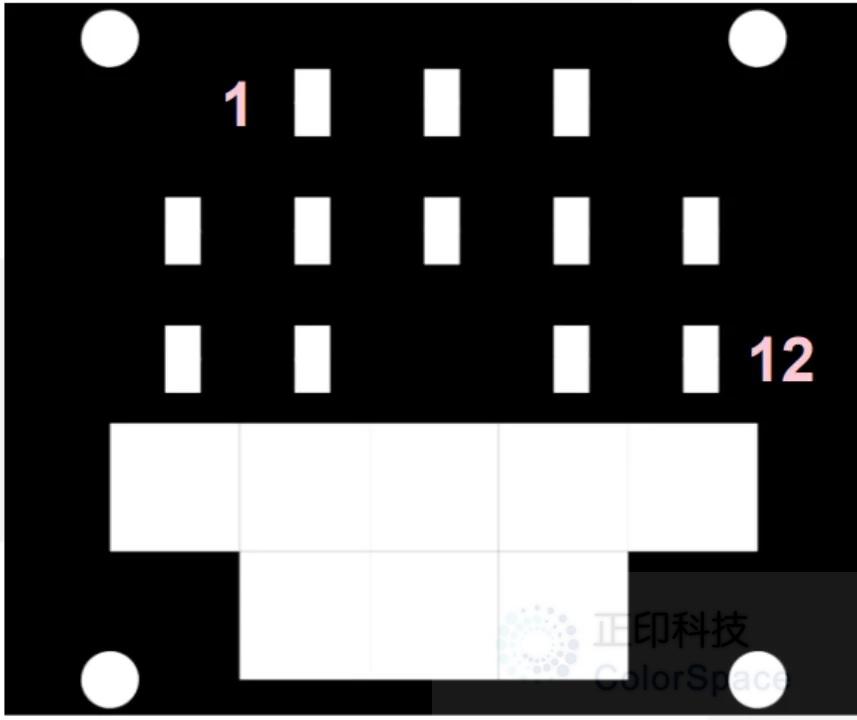
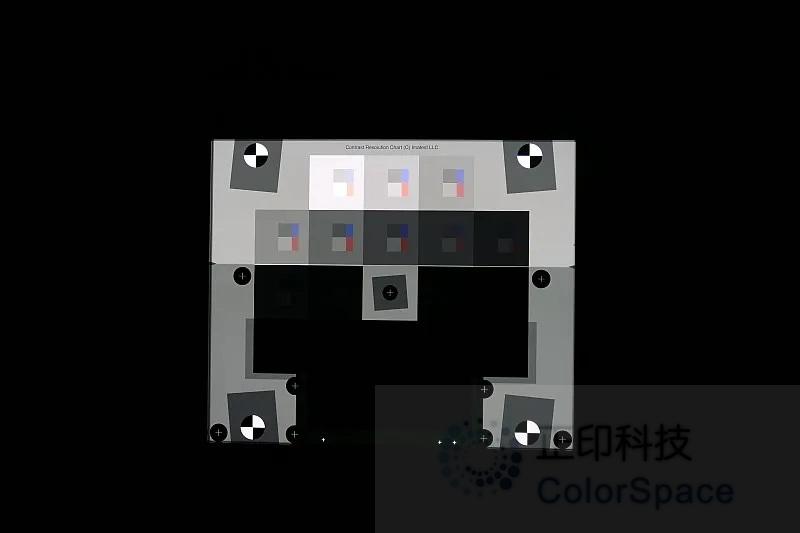
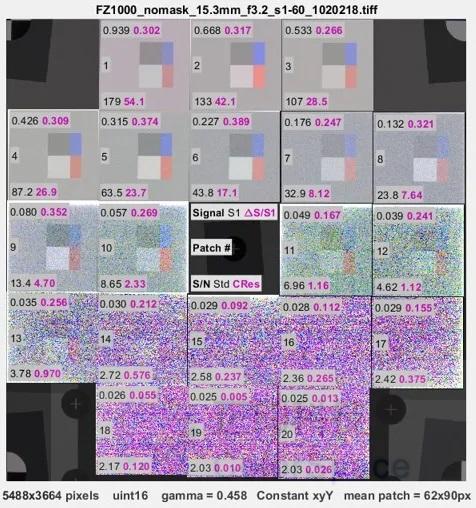
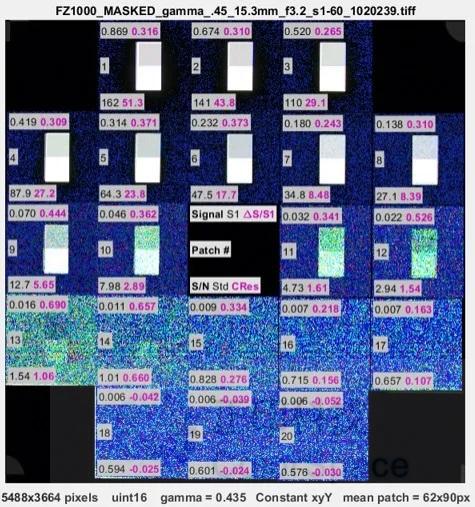
为了测量眩光及其影响,我们需要在相同条件(手动曝光)下拍摄两幅图像:一幅在拍摄时在测试图卡正前方放置一个能覆盖86%较亮区域(1至12区)的遮罩;另一幅则不放置遮罩。
我们使用带有1英寸传感器的超级变焦相机拍摄原始图像,并将其转换为16位TIFF格式图像(因为JPEG格式图像不适合用于此项计算)。

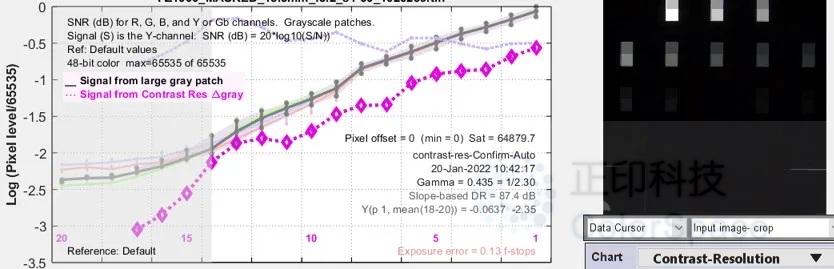
在有遮罩和无遮罩情况下的灰阶阶调响应测量结果分析:
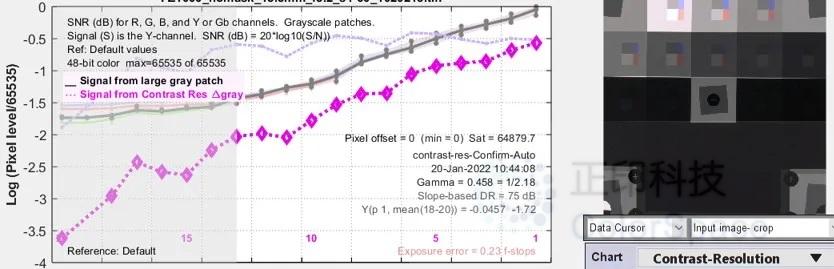
- p 是对数像素级别,无遮罩
- 色块 1, m(18-20)
- p = -0.046, -1.72,Δpnomask = -1.67
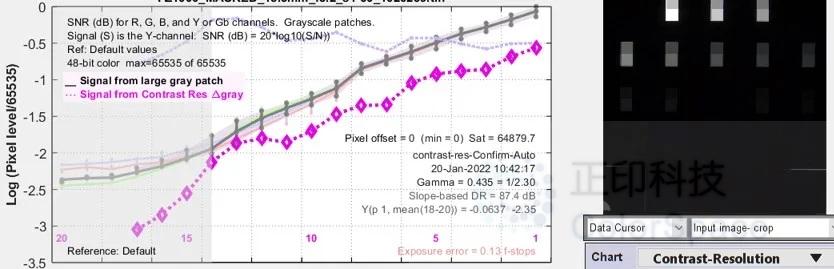
- 已遮罩,色块1,m(18-20)
- p = -0.064, -2.35,Δpmasked = -2.29
Δρ 是灰阶块1 的log(pixel level)与第 18 – 20 号灰阶块(最底行)平均值灰度值 m取对数,log(m)之间的差值。
线性失效
我们发现,测试系统并未如预期般呈现线性关系。这可能是由于传感器、图像处理或图卡标定等问题导致的。
非线性表现为响应低于红线(对于编码伽马值 γ = 1/2.2(Adobe RGB)的线性系统)。而杂散光则会导致响应高于红线,由于非线性因素的存在,线性眩光方程是近似值。
$\Delta VG = 10^{\left(\frac{\Delta p_{nomask}}{Y_{enc}}\right)} – 10^{\left(\frac{\Delta p_{masked}}{Y_{enc}}\right)}$
对于之前有无遮罩的对比测试图:
$\Delta VG = 10^{(-1.67 \times 2.2)} – 10^{(-2.29 \times 2.2)} = 2.022 \times 10^{-4} = -73.9 \, \text{dB}$
因为有遮罩的图像有一些眩光,所以ΔVG 不是一个绝对值。
有无遮罩情况下动态范围的测量
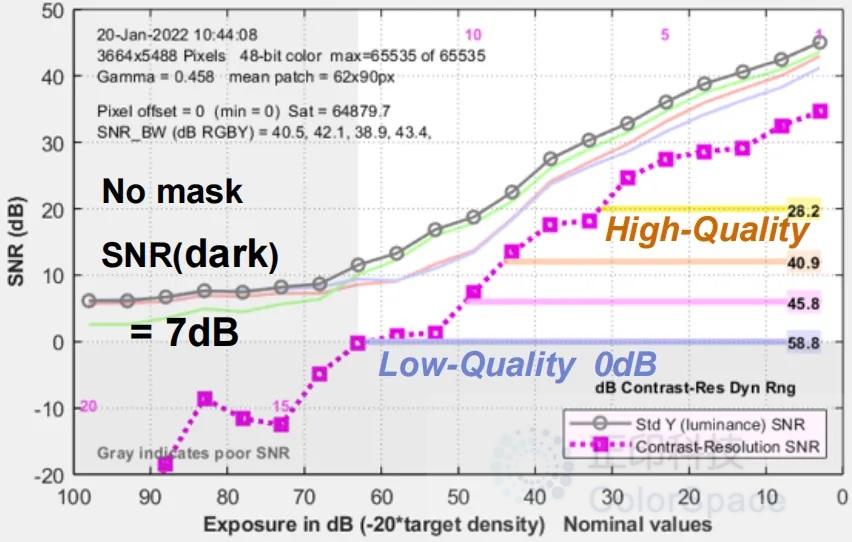 | 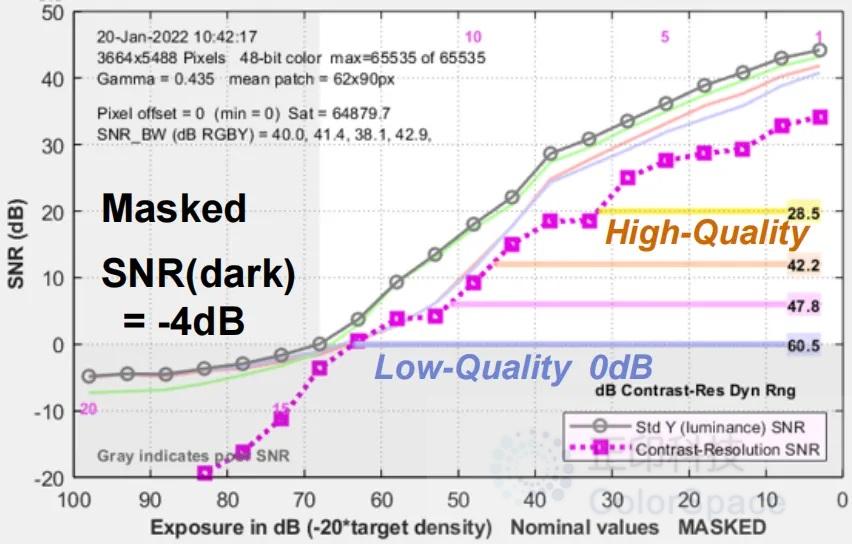 |
在黑暗区域,标准信噪比(灰色)在无遮罩情况下为 7dB,在有遮罩的情况下为-4dB。这种差异是眩光造成的伪像造成,这说明遮罩的使用对于杂散光的影响是明显的,遮罩后信噪比降低,显示杂散光对图像质量有显著影响。
用品红线(magenta line)表示的是从有无遮罩图像得出的对比分辨率动态范围,它对于遮罩图像有所改善,但标准动态范围几乎相同。这表明在特定条件下,遮罩可以帮助改善对比分辨率的测量,尽管对标准动态范围的影响不大。
相机在HDR性能上主要受到信噪比(SNR)的限制,高动态范围传感器能够更好地处理从非常暗到非常亮的广泛亮度范围,但这些传感器可能会受到眩光(Veiling Glare)的限制。可能导致对比度降低,影响图像质量。这表明尽管HDR传感器在处理高对比场景方面具有优势,但在减少杂散光方面可能还存在挑战。
等亮度(Y)图像比较
 |  |
为了更直观地比较两张图像的差异,我们将处理后的图像调整为相同亮度(Y)进行比较。结果发现两者表现相似。在特定色块中(如13、14号灰阶块),对比度表现良好但受噪声限制,我们预计在高动态范围传感器下会有不同的表现。
比较两张图像的方法总结
我们总结了三种比较无遮罩和有遮罩图像中眩光的方法:
- 比较底行灰阶块的对数(像素级别)平均值。无遮罩图像的该值更高,可以据此计算近似的线性眩光差异。
- 比较对比度分辨率动态范围(DRCR)。我们预计具有HDR传感器的相机在此方面差异更大。
- 观察处理后的图像(使所有灰阶块具有相同亮度Y)。该方法的结果与第二种方法类似。
需要注意的是,对于受眩光影响较大的相机而言,眩光测试对图卡设计、构图以及图卡外补光强度更敏感。因此,测量的标准化至关重要。
总结与展望
杂散光(尤其是眩光)是限制汽车摄像头性能的主要因素之一,特别是在有明亮灯光的夜间场景中。它能够遮蔽阴影区域中的重要细节。然而,汽车行业并未给予杂散光的影响及其测量方法足够的关注。
未来,我们需要回答以下重要问题:
- 汽车摄像头需要多大的动态范围?
- 我们是否需要在高亮以及阴影中都看到细节?
- 将眩光最小化会不会比将动态范围最大化更好呢?(镜头是否需要更多关注呢?)
为了推动这一领域的发展,我们计划采取以下行动:
- 测试更多HDR传感器的相机观察数据情况
- 改进杂散光(遮蔽眩光)测量方法,以更好地与相机性能相关联
- 在更具挑战性的条件下拍摄图卡,并在图卡区域外使用额外的明亮光源来模拟较苛刻的汽车路测场景
- 设计额外的测试图卡
- 继续对工程师进行培训,让他们理解:使用带镜头的相机去拍摄图卡测试动态范围,是无法接近HDR传感器标称数值的,这将是个巨大挑战。
通过以上努力,我们期望能够为汽车行业提供更加准确、可靠的眩光和动态范围测量方法,从而推动汽车摄像头性能的不断提升。
联系我们:
如果您有什么问题或想要了解的讯息,可以在下方评论区留言或直接联系我们:marketing@colorspace.com.cn或拨打电话400-886-3881!分享您的看法或提出您的问题!也欢迎点击表单填写您的需求。轻松一赞,快乐无限!喜欢就点个赞吧👍!

Was this helpful?
4 / 0
