发布时间:2024年12月24日
从两张图像中测量眩光和动态范围
杂散光,我们通常称之为眩光,它会模糊图像较暗区域的细节,从而降低图像质量。然而,测量眩光却并非易事。现在,我们提出了一种新技术,利用两张反差分辨率测试卡的图像 — 一张未加遮罩,一张加了遮罩,来获取以下信息:
- 眩光的测量值
- 眩光对相机性能的影响,特别是对暗区物体可见性的影响
- 两个动态范围(DR)测量值
 |  |
| 无遮罩图像 | 有遮罩图像 |
眩光
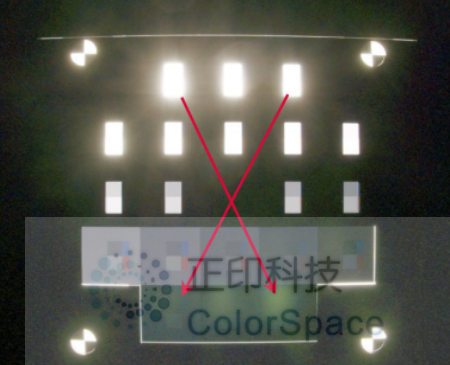
眩光,这种来自图像内部或外部明亮区域的杂散光,会让整个图像或部分图像变得模糊。它可能会以“鬼影”的形式出现,使图像显得杂乱无章,这种“鬼影”效果对于不同的镜头来说差异很大!眩光通常从明亮的光源辐射出去,并随着距离的增加而逐渐减弱。当它以鬼影的形式呈现时,我们称之为“眩光”。值得注意的是,眩光(Veiling glare)可能会误导性地提高动态范围的测量值,而实际上它降低了真正的动态范围(DR)。在加遮罩且过曝、增亮的图像中,眩光现象尤为夸张,有时甚至可见鬼影(但请注意,此处分析的图像并非同一张)。
ISO 18844(传统的眩光测量标准)
ISO 18844是衡量眩光的一个常用标准。目标区域由带有多个黑色凹槽的白色区域组成。在每个黑色凹槽内部进行像素级别的测量,并根据伽马编码(如果有的话)进行校正,然后与周围的白色区域进行比较。然而,这种技术存在以下缺陷:
- 它只测量短距离的眩光。对于长距离的眩光,例如远处车头灯对阴影区域的影响,则没有考虑在内。
- ISO 18844测量结果与实际图像质量下降(如动态范围减小、阴影区域模糊等)之间缺乏良好的相关性。
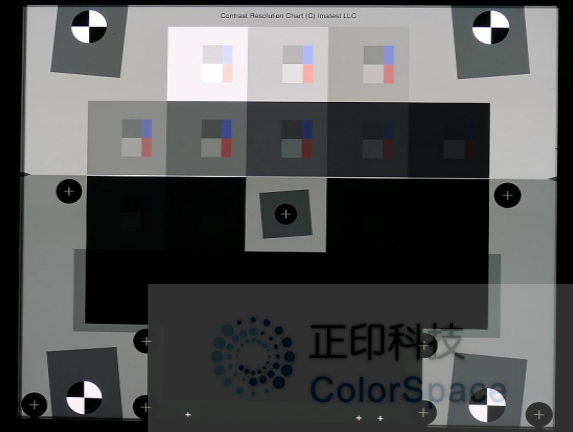
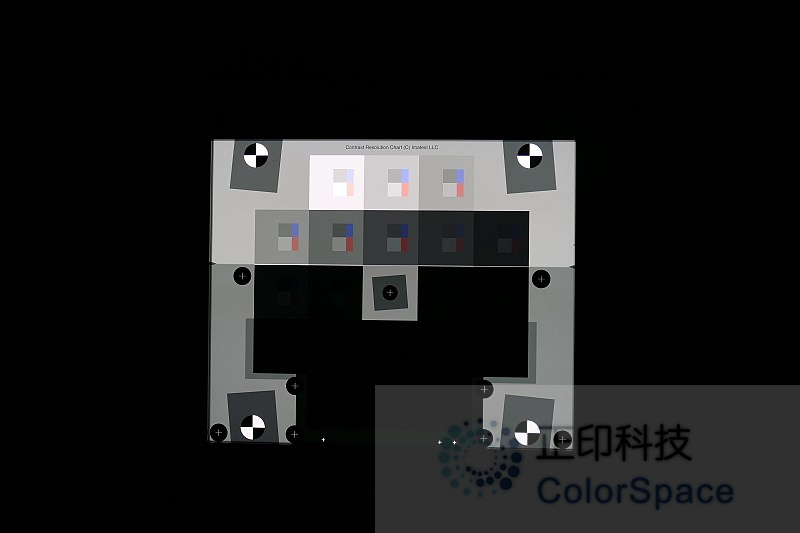
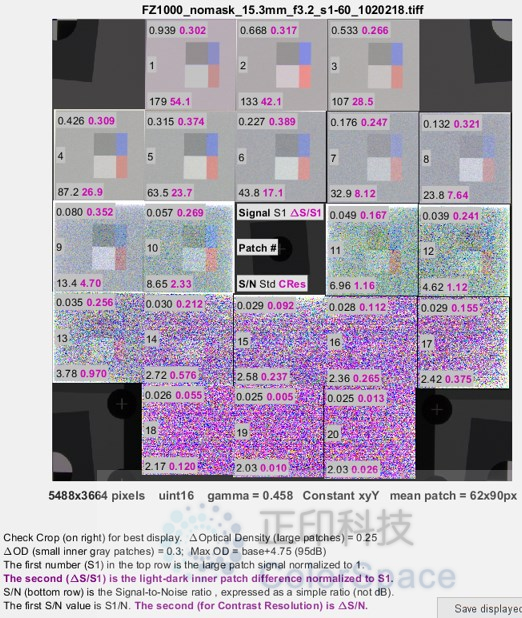
反差分辨率测试卡
反差分辨率测试卡是一种透射式的图卡,它主要从以下两个方面测量动态范围:
(1)标准灰度区域
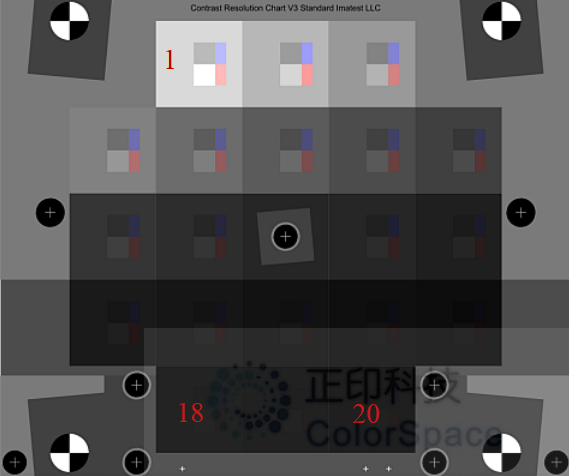
(2)相邻小色块之间的差异,其中Δ(光学密度)= 0.3(即2:1的对比度)。这种设计有助于减少来自偏移、眩光、局部色调映射和线性偏差的虚假信号读数。大色块的密度增量为5 dB。测量眩光时,我们使用底行(18-20号)色块的平均值,这些眩光主要来源于顶行的明亮色块。底行色块的平均图卡密度比1号色块低90 dB(即3.16×10-5 × 1号色块的密度)。
动态范围测量标准
动态范围(DR)被定义为图像在具有良好信噪比(SNR)和良好图像对比度的曝光范围内的部分。其中,信号s代表来自大色块的像素值,图像对比度c是log(s)的斜率。
$$[c = \frac{d(\log(s))}{d(\log(\text{曝光}))} \geq 0.075 c_{\max}]$$
由于杂光(眩光)的影响,暗区的对比度通常较低。在计算标准动态范围(DR)时,我们采用场景参考信噪比(Scene-referenced SNR),该值排除了对比度c的影响。
$$[N_{\text{scene-ref}} = \frac{N_{\text{pixel}}}{\frac{d(s)}{d(\text{曝光})}}]$$
$$[SNR_{scene_ref} = \frac{s}{N_{scene_ref}}]$$
动态范围和对比度分辨率
DRCR通过测量和分析图像中的像素级差异(Δs),能够更有效地识别出场景中低对比度的物体,从而提供比标准动态范围更准确的图像信息。
对比度分辨率信号$[\Delta = pixel\ level_{light} – pixel\ level_{dark} ]$
对比度分辨率信噪比(Contrast Resolution SNR)用于动态范围对比度分辨率(DRCR)的计算
$$[SNR_{CR} = \frac{\Delta s}{N_{middle}}]$$
DRCR(动态范围对比度分辨率)以水平条表示:高质量(SNRCR = 20 dB)时为28.2 dB。DRCR通常与标准动态范围相似,但对于色调映射图像来说更为准确,并且具有较高的稳定性。
动态范围的限制因素
动态范围可能受到信噪比(SNR)或眩光的限制,或两者的共同作用。以下是一些典型案例:
- 在配备线性传感器和高质量镜头的单反/无反相机中,动态范围主要受信噪比(SNR)的限制。
- 在那些配备高动态范围(HDR)传感器且传感器性能优于镜头的相机中,动态范围可能受到眩光的限制。这种情况下,阴影区域可能会变得模糊不清。
值得注意的是,高动态范围(HDR)传感器(其性能受眩光限制)在汽车行业的应用日益广泛。(由于时间和资源限制,我们未能提供HDR传感器受眩光限制的相机实例。)
信噪比(SNR)表现
反差分辨率测试卡能够显示具有相同亮度水平(Y从xyY)的大色块。特征的可见度在信噪比(SNR)和对比度较低的地方会下降。信噪比(标准值)和对比度较低(以比值形式表示,非dB形式)是基于信号值s和信号变化量Δs得出的。
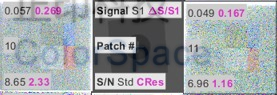
当SNR过低时,图像会淹没在噪声中;而当对比度过低时,图像则会显得模糊不清。
从两张图像中测量眩光及其影响
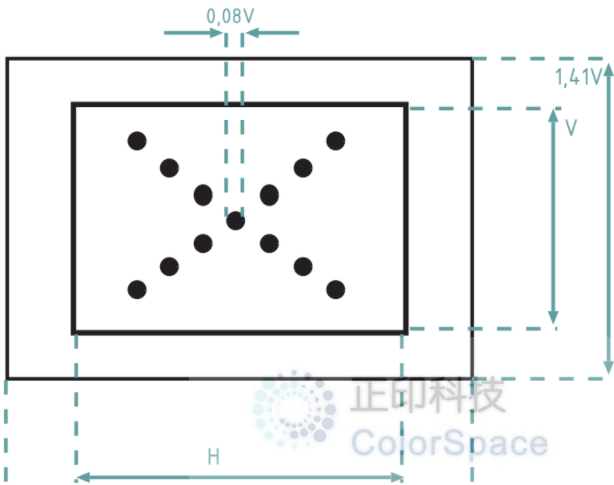
为了测量眩光及其影响,我们需要在相同条件(手动曝光)下拍摄两幅图像:一幅在拍摄时在测试图卡正前方放置一个能覆盖86%较亮区域(1至12区)的丙烯酸遮罩;另一幅则不放置遮罩。我们使用带有1英寸传感器的超级变焦相机拍摄原始图像,并将其转换为16位TIFF格式图像(因为JPEG格式图像不适合用于此项计算)。
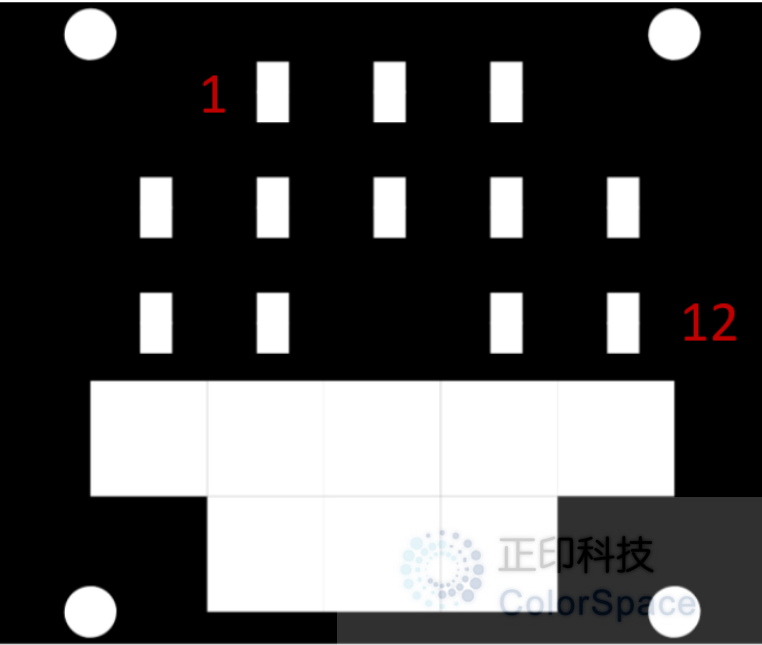 |  |  |
| 遮罩 | 无遮罩图像 | 有遮罩图像 |
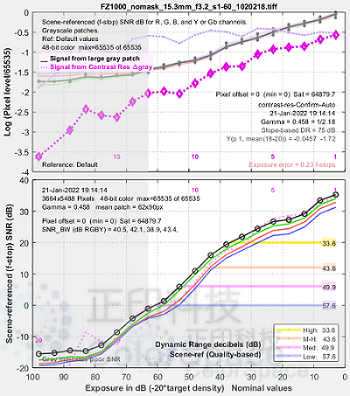
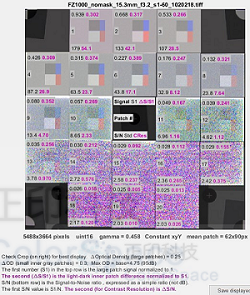
在有遮罩和无遮罩情况下的色调响应测量。
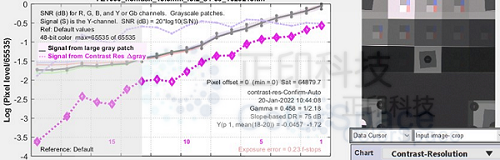
以下是上图的分析结果:
p 是对数像素值
色块1,m(18 – 20)
p = – 0.046,- 1.72
Δρ 无遮罩 = – 1.67
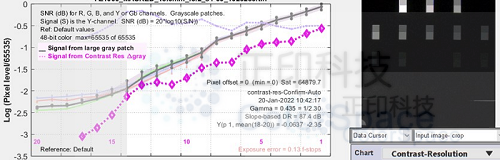
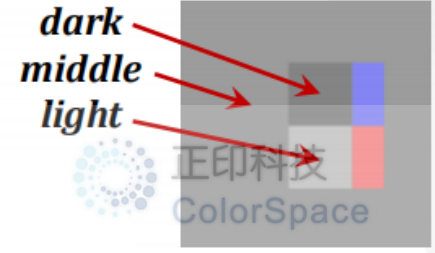
以下是上图的分析结果:
色块1,m(18 – 20)
p = – 0.64,- 2.35
Δρ 有遮罩 = – 2.29
Δp 是色块 1 的对数(像素值)与第 18 – 20 号色块(最底行)平均值 m 之间的差值。下一张幻灯片有一个关于光照水平的近似方程式。
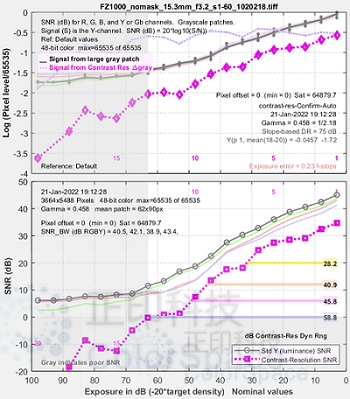
线性失效
我们发现测试系统并未如预期般呈现线性关系。这可能是由于传感器、图像处理或图卡本身的问题导致的。

非线性表现为响应低于红线(对于编码伽马值 γ = 1/2.2(Adobe RGB)的线性系统)。而杂散光则会导致响应高于红线。
由于非线性因素的存在,线性眩光方程是近似值。
$$[\Delta VG = 10^{\frac{\Delta P_{nomask}}{\gamma_{enc}}} – 10^{\frac{\Delta P_{mask}}{\gamma_{enc}}}]$$
对于上述例子,ΔVG=10(-1.67*2.2)-10(-2.29*2.2)=2.022*10-4=-73.9dB,因为有遮罩的图像有一些眩光,所以ΔVG 不是一个绝对值。
有无遮罩情况下动态范围的测量
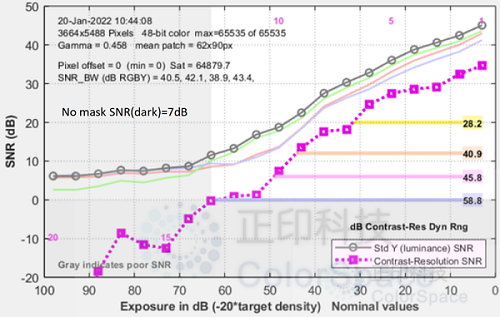 | 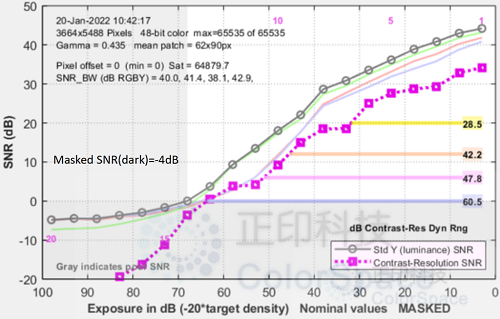 |
| 无遮罩情况下的信噪比 | 有遮罩情况下的信噪比 |
黑暗区域的标准信噪比在无遮罩时为7dB,有遮罩时为-4dB。这种差异是由眩光造成的假象,而标准信噪比并不用于动态范围(DR)的计算。
对比度分辨率动态范围在有遮罩图像的情况下只是略好一些,而标准动态范围则几乎相同。这表明该相机主要受信噪比限制。
我们预计,在配备高动态范围(HDR)传感器的汽车摄像头中,这种差异会更加明显。这类摄像头很可能受眩光限制,导致阴影区域变得模糊不清。
等亮度(Y)图像比较
 |  |
为了更直观地比较两张图像的差异,我们将处理后的图像调整为相同亮度(Y)进行比较。结果发现两者表现相似。在特定色块中(如13、14号色块),对比度表现良好但受噪声限制。我们预计在高动态范围传感器下会有不同的表现。
比较两张图像的方法总结
我们总结了三种比较无遮罩和有遮罩图像中眩光的方法:
- (1)比较底行色块的对数(像素级别)平均值。无遮罩图像的该值更高,可以据此计算近似的线性眩光差异。
- (2)比较对比度分辨率动态范围(DRCR)。我们预计具有HDR传感器的相机在此方面差异更大。
- (3)观察处理后的图像(使所有色块具有相同亮度Y)。该方法的结果与第二种方法类似。
- 需要注意的是,对于受眩光限制的相机而言,眩光测量对图卡设计、构图以及图卡外照明高度敏感。因此,测量的标准化至关重要。
总结与展望
这项工作的动机源于对汽车摄像头性能的担忧。杂散光(眩光)是限制汽车摄像头性能的主要因素之一,特别是在有明亮灯光的夜间场景中。它能够遮蔽阴影区域中的重要细节。然而,汽车行业并未给予杂散光的影响及其测量方法足够的关注。
未来,我们需要回答以下重要问题:
- 汽车摄像头需要多少动态范围?
- 我们是否需要在光源以及阴影中都看到细节?
- 将眩光最小化会不会比将动态范围最大化更好呢?(也就是说,镜头是否需要更多关注呢?)
为了推动这一领域的发展,我们计划采取以下行动:
- 使用HDR传感器测量更多相机。
- 改进杂散光(遮蔽眩光)测量方法,以更好地与相机性能相关联。
- 在更具挑战性的条件下拍摄图卡,并在图卡区域外使用额外的明亮光源来模拟最差的汽车场景。
- 设计额外的测试图卡(我们正在探索一种新的图卡技术;但尚未准备好投入主流使用)。
- 继续对工程师进行教育,让他们理解:使用镜头拍摄的图像所测量的相机动态范围,永远无法接近HDR传感器规格中的数字。这是一个持续的挑战。
通过以上努力,我们期望能够为汽车行业提供更加准确、可靠的眩光和动态范围测量方法,从而推动汽车摄像头性能的不断提升。
联系我们:
如果您有什么问题或想要了解的讯息,可以在下方评论区留言或直接联系我们:marketing@colorspace.com.cn或拨打电话400-886-3881!分享您的看法或提出您的问题!也欢迎点击表单填写您的需求。

Was this helpful?
2 / 0
