发布时间:2024年11月22日
1. 引言
内窥镜技术随着诊断能力的提高和复杂的光学设计而发展。几何畸变作为几个重要的光学性能特征之一,可能会对尺寸估计和特征识别相关的诊断产生负面影响。因此,对于内窥镜行业和医疗器械监管机构来说,迫切需要一种定量且简单的畸变评估方法。
然而,目前尚无此类方法。虽然图像校正技术已经相当成熟,但它们严重依赖于计算能力来处理基于复杂数学模型的多维图像数据,难以理解。一些常用的畸变评估方法,如画面高度畸变(DPH)或径向畸变(DRAD),要么过于简单,无法准确描述畸变,要么在获取参考图像时容易出错。
我们开发了基本的局部放大(ML)方法来评估内窥镜畸变,并基于该方法开发了计算DPH和DRAD的方法。该方法克服了上述限制,在整个视场中具有清晰的物理意义,并可以在诊断过程中促进病变大小的估计。最重要的是,该方法可以促进内窥镜技术的市场化,并有可能被采纳为国际内窥镜标准。
1.1 内窥镜畸变
光学畸变包括两种主要类型:色差和单色畸变。前者源于折射率实际上是波长的函数。后者即使在准单色光下也会发生,分为两个子组:单色畸变恶化图像,使其不清晰(例如,球差、彗差和散光),以及单色畸变扭曲图像(例如,佩兹瓦尔场曲率和畸变)。
本文关注扭曲图像的单色畸变,称为几何畸变。几何畸变是与直线投影的偏差,其中场景中的直线在图像中保持直线。虽然在显示(尤其是阴极射线管显示)中也可以看到类似的畸变,本文主要关注由几何光学引起的几何畸变。
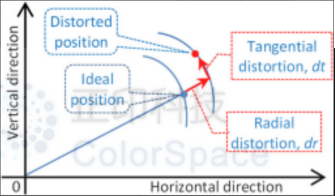
在不同类型的几何畸变中,径向畸变是最常见和最严重的。它们导致给定图像点沿径向从其未畸变位置向内(桶形畸变)或向外(枕形畸变)位移。径向畸变也可以是桶形和枕形畸变的组合,称为胡子(或波纹)畸变。在具有径向畸变的图像中,穿过图像中心(通常也是畸变中心)的直线保持直线。由于大多数径向畸变是圆对称的(即,相对于任何角度相对于光学成像系统的圆对称性),与图像中心同心的圆在其图像中保持圆形,尽管其半径可能会受到影响。一些复杂的畸变包括径向和切向分量,即给定图像点沿径向(径向畸变)和切向(切向畸变)方向位移。
本文中提到的畸变,除非另有说明,否则指的是本文关注的径向几何畸变。内窥镜通常具有严重的桶形畸变。内窥镜需要短焦距和宽视场(FOV),以便在最小移动或弯曲内窥镜的情况下观察广泛区域,这对于由于受限空间和运动自由度以及手术过程中手眼协调的限制而稳定和平滑操作内窥镜至关重要。
然而,内窥镜中使用的透镜通常焦距短(仅几毫米)且视场宽(从100到170度),这不可避免地导致严重的畸变。通常,内窥镜表现出桶形畸变。偶尔,内窥镜表现出在桶形和枕形之间变化的胡子畸变,主要是因为在最大图像高度或其他图像部分使用数学算法来校正畸变。由于内窥镜畸变可能会对尺寸估计和特征识别相关的诊断产生负面影响,因此对内窥镜畸变进行定量评估和正确理解评估结果至关重要。
1.2 内窥镜畸变评估方法的需求
在美国,每月进行数百万次内窥镜手术,以满足广泛的适应症,推动内窥镜成像技术的进步。随着新的诊断能力和更复杂的光学设计,内窥镜的技术进步承诺在安全性和有效性方面取得显著改进。内窥镜光学性能(OP)可以通过OP特征(OPCs)进行评估,包括分辨率、畸变、视场、视向、景深、最佳工作距离、图像噪声、检测均匀性、遮光眩光等。
当前的共识标准为评估内窥镜OP提供了有限的信息,关于验证和定量测试方法。尚无标准化方法来评估内窥镜畸变。一个国际标准规定了确定光学系统中畸变的方法。这些方法需要使用复杂的设备,如自动准直仪,或用于测量物和像瞳场角度和高度的仪器。虽然该标准提供了复杂的方程,但它没有澄清如何呈现和评估畸变结果。
此外,该标准中提到的图像高度畸变值对于评估严重的桶形或枕形畸变是不充分的,并且对于评估胡子畸变也失败了。该标准中的角放大率和横向放大率的定义仅基于测试样品光轴附近的小区域,无法扩展到FOV内放大率显著变化的内窥镜。国际标准化组织(ISO)的内窥镜工作组(WG),ISO/TC172/SC5/WG6,开发和监督涵盖FOV、视向和光学分辨率的内窥镜OPCs的内窥镜标准(ISO 8600系列标准)。
然而,该WG尚未制定内窥镜畸变标准。随着内窥镜技术的快速发展,内窥镜OP评估的监管科学未能跟上。每年,美国食品药品监督管理局都会收到大量内窥镜提交的上市前通知或上市前批准。但由于缺乏客观的OP标准,评估新的视频内窥镜设备变得困难。行业缺乏共识标准,以评估畸变的客观测试方法。不同设备制造商进行的测试拼凑导致将重要的内窥镜技术推向市场的时间延迟,并可能允许清除光学性能较差的系统,从而对患者护理产生负面影响。
在本文中,我们试图建立一种定量的、客观的和简单的内窥镜畸变评估方法,并希望将该方法应用于国际内窥镜标准。我们回顾了一些先前期刊文章中描述的用于评估光学成像系统畸变的常用方法,并分析了这些方法之间的关系。基于审查,我们开发并验证了一种基于局部放大思想的评估内窥镜径向畸变的定量测试方法。该方法将有助于促进各种标准和内窥镜成像产品的性能表征和设备间比较。该方法有可能通过减少内窥镜制造商和监管机构的工作量,以最少的负担方式促进产品开发和监管评估过程。
因此,新颖、高质量的内窥镜系统可以迅速进入市场。该方法还可以用来促进对性能不佳的内窥镜的快速识别和理解原因,并在制造过程中的质量控制以及临床实践中的质量保证中受益。
- 畸变评估常用方法回顾
本节回顾了用于畸变评估的常见方法。图像传感器上的畸变模式可能与显示设备上显示的模式不同,因为硬件(如阴极射线管CRT)或软件(如图像处理算法)的影响。
为简单起见,本文重点关注来自图像传感器的数字图像畸变,这些图像可能已经或可能没有经过处理。然而,这些方法也可以扩展到评估显示畸变。理论上,几何畸变可能包括径向和切向分量,即给定图像点沿径向(径向畸变)和切向(切向畸变)方向位移。
本文中称为径向-切向畸变的这种畸变,包括偏心畸变和薄棱镜畸变。一个径向-切向畸变可以通过比较畸变图像上的二维(2-D)点与其在理想非畸变图像上的位置来评估。它可以被描述为一个2-D矩阵,显示每个点的相对位置变化作为x-y坐标的函数。在光学成像系统中,几何畸变的切向分量基本上由不完美的圆对称性决定。然而,根据目前的技术水平制造的光学成像系统具有可以忽略不计的切向畸变。因此,本文仅关注径向畸变。
2.1 图像高度畸变和相关方法
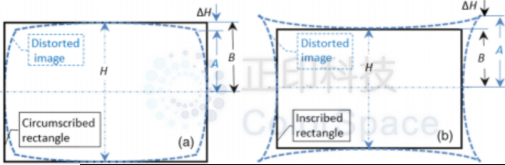
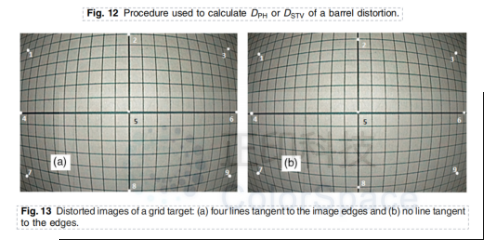
有几种畸变评估方法。图像高度畸变方法(DPH,其中D表示畸变)由欧洲广播联盟(EBU)定义,并被ISO 9039国际标准推荐。它量化了与桶形畸变(对于桶形畸变)或内切(对于枕形畸变)矩形的畸变图像相切的水平直线图像的弯曲。如图2所示,它的计算公式为:
$$[DPH(\%) = \frac{\Delta H}{H} \times 100 = \frac{(A – B)}{H} \times 100]$$
其中B是H的一半,H是畸变图像的桶形畸变或内切矩形的高度。DPH值对于桶形畸变是负数,对于枕形畸变是正数。报告的DPH值应该是所有四个角的平均值。虽然DPH最初是为垂直方向定义的,但它也适用于水平畸变。DPH也称为电视(TV)畸变方法(DTV)或传统TV畸变方法。TV畸变这个术语之所以被使用,是因为这种几何畸变经常在传统的CRT电视上观察到,这是由于内部或外部磁场的影响,或者是因为这种方法经常用于评估显示设备上的畸变。尽管CRT电视几乎已经过时,但TV畸变这个术语仍然被广泛使用,尽管其含义不再是与电视相关的原始含义。一个名为标准移动成像架构(SMIA)的开放标准,为移动成像设备制造商自我规范定义了一种与DPH类似的畸变评估方法。我们称这种方法为SMIA TV畸变方法(DSTV),以区分DTV或DPH。
DSTV可以计算为:
$$[ \text{DPH}(\%) = \frac{\Delta H}{H} \times 100 = \frac{(A – B)}{H} \times 100 ]$$
报告的DSTV值也应该是所有四个角的平均值。显然,对于同一畸变图像,DSTV值是DPH值的两倍,即DTV值通常是DPH值的两倍。
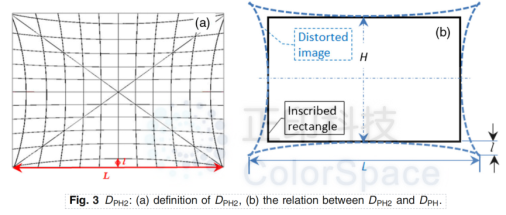
另一种畸变评估方法是在图3中提出的。如果我们画一条直线连接弯曲线的两端——目标中直线的图像,其长度是L,从这条画线的任何点到弯曲图像线上的最大距离是l[图3(a)]——那么畸变定义为:
$$[ DPH2(\%) = \frac{l}{L} \times 100 ]$$
与DPH相比,DPH2值对于桶形畸变是正数,对于枕形畸变是负数。否则,DPH2的定义与DPH相似。DPH2中l的绝对值与DPH方法中畸变图像下边缘的ΔH的绝对值相同。比较图2和图3,我们可以得到DPH2与DPH的关系:DPH2 = -DPH × H/L。由于DPH2方法与DPH方法相比没有显著优势,我们不建议使用这种方法进行畸变评估。前述畸变评估方法计算了整个图像上桶形或枕形畸变的最大位置误差。
它们只有在光学系统从图像中心到边缘有稳定增加的畸变(桶形或枕形畸变)时才有意义。对于复杂的畸变模式,用单一值评估畸变是不可能的,因为该值可能是误导性的。以胡子畸变为例,图像在边缘可能显示很小或几乎没有畸变,就像这些方法测量的那样,但在中场有最大畸变。这些方法还与畸变图像的宽高比有关。EBU定义了宽高比为4:3的DPH,这是传统电视和计算机监视器标准的比例。然而,还有其他广泛使用的宽高比,如经典35毫米静态相机胶片的3:2比例和高清视频的16:9比例。我们不能直接比较两个具有不同宽高比的图像的畸变值。
2.2 径向畸变方法
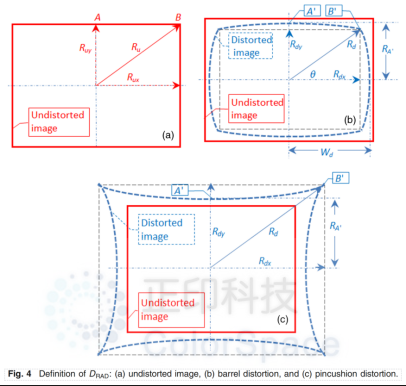
另一种畸变评估方法是基于比较畸变(Rd)和未畸变(Ru)图像的半径。假设光学中心附近的畸变为零。因此,可以根据畸变图像中心的信息计算未畸变图像。然后,以未畸变图像为参考,沿径向评估畸变图像。由于这种方法可以应用于任何径向畸变,我们称之为DRAD。如图4所示,
$$[ \text{DRAD}(\%) = \frac{R_d – R_u}{R_u} \times 100 ]$$
其中Rd是畸变图像中某点到图像中心的距离,Ru是相应点在计算出的未畸变图像中到图像中心的距离。该点可以来自畸变图像的任何位置,除了图像中心,其中Ru可以无限小,尽管图4仅显示了右上角作为示例。如果Rd和Ru的绝对值以相同的比例放大,畸变评估结果将不受影响。
DRAD可以用来评估复杂畸变(例如,胡子畸变)沿半径线的畸变轮廓。胡子畸变可能是由设计对策或限制或消除畸变的图像处理算法引起的。如果我们计算从图像中心到角落的对角线上的DRAD,我们可以得到DRAD与Ru或Rd的曲线,如图5所示。
对于简单的桶形或枕形畸变,如果DPH或DTV值是负数,我们可以确定为桶形畸变,如果值是正数,则为枕形畸变。然而,这个标准将无法识别胡子畸变。关键是畸变类型的识别不应依赖于畸变值的符号,而应依赖于径向畸变曲线的斜率。典型的径向畸变曲线如图5所示。
通常,这些畸变曲线从零开始,与假设光学中心附近的畸变为零相匹配。对于桶形畸变[图5(a)],曲线斜率始终为负;因此,畸变值也是负数。对于枕形畸变[图5(b)],曲线斜率始终为正,导致畸变值为正数。对于胡子畸变,曲线在不同区域具有正负斜率值。从图5(c)中,当Rd < 11.7 mm时,曲线斜率为负,当Rd > 11.7 mm时,曲线斜率为正。这意味着即使对于Rd > 11.7 mm,畸变值仍然是负数,图像在Rd < 11.7 mm时具有桶形畸变,在Rd > 11.7 mm时具有枕形畸变。绝对斜率值越高意味着在这个半径处畸变越明显。对于简单的桶形或枕形畸变,从图像角落计算的径向畸变的绝对值通常大于DPH/DTV或DSTV的绝对值。这可以用图4中的桶形畸变从理论上解释。
在图4(a)中,点A和B分别是未畸变图像上边缘的中点和右角,它们与图像中心在垂直方向上的距离是Ruy。在图4(b)中,点A0和B0分别是A和B的图像,它们与图像中心在垂直方向上的距离是RA0和Rdy。对于桶形畸变,A和B都向图像中心在垂直方向上畸变(RA0 – Ruy)和(Rdy – Ruy)的量,负值表示桶形畸变。
同时,B在垂直方向上向图像中心移动了(Rdy – RA0)的量,相对于A’向图像中心移动了(RB’-RA’)的量。因此,DSTV的方程可以表示为 DSTV = (Rdy − RA0) / RA0,而DRAD的方程可以表示为 DRAD = (Rd − Ru) / Ru。
对于桶形畸变,A和B都向图像中心在垂直方向上畸变,B相对于A0在垂直方向上的移动量是 (Rdy − RA0),同时B相对于A在垂直方向上的移动量是 (Rdy − RA0) + (RA0 − Ruy),这也就是DRAD方程中B点相对于A点在垂直分量上的移动量。由于Ruy和RA0的值接近,DSTV大致等于DRAD方程中B点相对于A点在垂直分量上的移动量,不考虑A在垂直方向上的移动量和B在水平方向上的移动量。这也解释了为什么DSTV的绝对值通常小于DRAD的绝对值。
对于枕形畸变,也可以得出类似的结论。DRAD方法的主要问题是Ru值不可用,因为未畸变的图像并不存在。Ru值可以根据畸变图像中心的数据近似,假设光轴附近没有或几乎没有畸变。
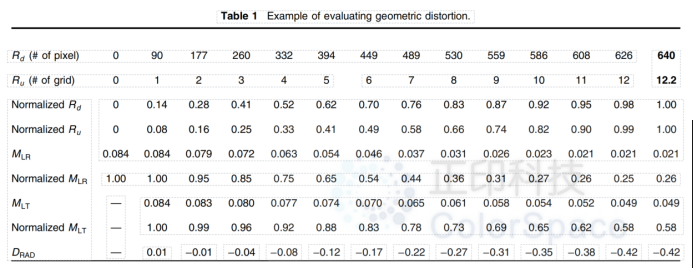
以网格目标的图像为例,如果我们知道畸变图像中心的参考网格距离对应的像素数是P,那么未畸变图像中从图像中心到G网格的距离应该是P × G像素,基于此我们可以计算出网格目标的未畸变图像,然后计算DRAD值。
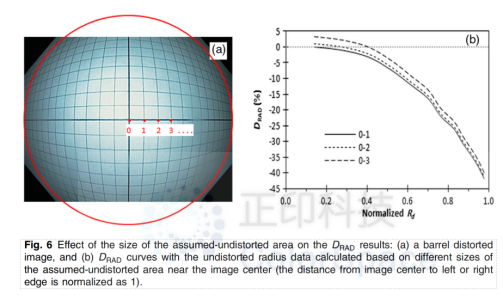
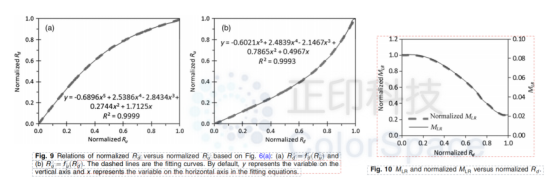
然而,这种方法存在问题。在畸变图像中假设未畸变区域的大小会影响严重畸变的结果,如大多数内窥镜图像所示。如果参考网格太大,它可能已经被畸变。图6(a)显示了一个桶形畸变的图像。从图像中心到右侧的水平距离,我们得到了每个交叉点从中心的距离(Rd)。通过假设在0-1、0-2或0-3点之间没有畸变,我们分别计算了这些不同假设下的未畸变距离(Ru),并得到了图6(b)中显示的三个DRAD曲线。对于桶形畸变,畸变值应该随着半径单调递减,中心的最大值为零。
然而,图6(b)中的0-2和0-3曲线在较短的径向距离上显示正值,这表明假设从点0到点2或点3没有畸变的假设不如假设从点0到点1没有畸变的假设准确,更大的假设未畸变区域会导致更大的误差。另一方面,如果假设的未畸变区域太小,中心处Rd的读数误差会因为更远径向距离处大量网格导致的误差而被放大。

3. 内窥镜畸变评估的局部放大方法开发
本节介绍了局部放大(Local Magnification, LM)方法的开发,这是一种用于评估内窥镜畸变的定量方法。该方法旨在提供一个数学上和实验上简单,且能够清晰描述内窥镜畸变特征的方法。
3.1 实验测量
实验目的和设备
- 目的:建立一个畸变评估方法,使用特定的内窥镜系统来模拟和测量畸变。
- 设备:使用的内窥镜系统为 Olympus EVIS EXERA II,包括一个高强度氙灯源(CLV-180)、一个胃肠视频镜(GIF-H180)和一个视频系统中心(CV-180)。这套系统展现了大多数内窥镜常见的桶形畸变。
测试目标设计
- 目标:设计并打印了三种不同网格大小的网格目标,分别为 0.5 mm × 0.5 mm、1.5 mm × 1.5 mm 和 3.0 mm × 3.0 mm。
- 覆盖范围:每个目标的总尺寸足够覆盖整个视场区域,确保测试的全面性。
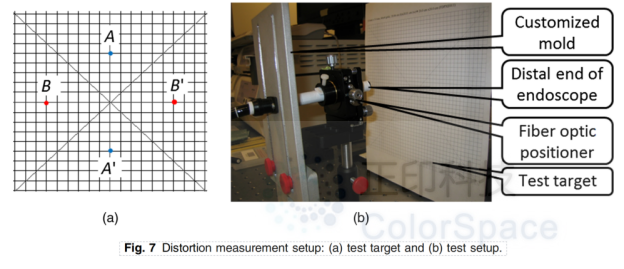
- 实验设置
- 固定和调整:使用定制的模具和光纤定位器(Newport, FPR2-C1A)确保内窥镜固定在其位置,并且方向调整得当。
- 对齐:调整内窥镜的光轴使其垂直于测试目标,并与测试目标中心对齐。这是为了确保测量的准确性和重复性。
调整标准
- 中心对齐:确保目标的中心、位于视场中心的点位于捕获图像的中心。
- 对称点对齐:确保图像中对称点(例如,A – A’ 和 B – B’)在目标上也是对称的。
图像分析
软件工具:使用图像分析软件(例如 MATLAB)来找到图像中的目标中心(xt,yt),并计算目标中心到图像中心(xi,yi)的距离,公式为:
$$[ \sqrt{(x_t – x_i)^2 + (y_t – y_i)^2} ]$$
距离单位为像素,控制在图片高度的1%以内(对于1008×1280像素的图像约为10像素)。
3.2 局部放大方法量化畸变
局部放大(LM)方法概述
- 定义:局部放大(LM)方法评估内窥镜畸变,通过测量图像上某点到图像中心的距离(径向距离 Rd与实际距离Ru之比。
- 目标:该方法旨在提供一个数学上和实验上简单,且能够清晰描述内窥镜畸变特征的方法。
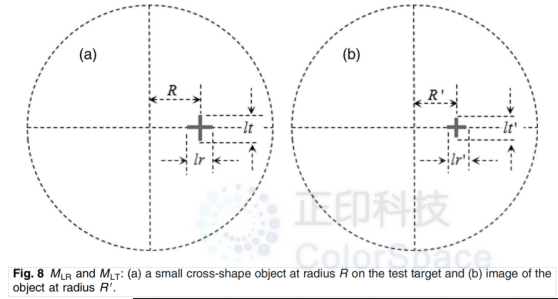
局部径向放大(MLR)和局部切向放大(MLT)
- MLR:局部径向放大是朝向视场中心的局部一维(1-D)物体的局部放大。
- MLT:局部切向放大是切向于径向方向的局部1-D物体的局部放大。
实验步骤
- 1. 图像获取:在适当的距离和对齐条件下,获取测试目标的图像。
- 2. 坐标读取:使用图像分析软件读取图像中心到每个交叉点的径向距离Rd。
- 3. 实际距离获取:确定这些交叉点在实际目标上的距离Ru,通常以网格数表示。
多项式方程
- 归一化:将Rd和Ru归一化,使它们的最大值为1。
- 方程建立:基于归一化的Rd和Ru数据,建立多项式方程Rd = f(Ru)或 Ru = f(Rd)。
局部径向放大(MLR)计算
MLR公式:MLR定义为图像上某点到图像中心的距离与实际距离之比,即
$$[ MLR = \frac{Rd}{Ru} ]$$
多项式形式:使用多项式方程Rd = f(Ru)来计算每个交叉点的MLR。
局部切向放大(MLT)计算
MLT公式:MLT定义为两个半径分别为R0和R的圆周长之比,即
$$[ MLT = \frac{2\pi R}{2\pi R} = 1 ]$$
多项式形式:使用多项式方程 \(Rd = f(Ru)\) 来计算每个交叉点的MLT。
导出DRAD和DPH(或DSTV)
DRAD:径向畸变可以通过MLR数据导出。
DPH/DSTV:画面高度畸变和电视畸变也可以通过MLR数据导出。
3.3 从MLR导出DRAD和DPH(或DSTV)
利用MLR计算DRAD
DRAD定义:径向畸变(DRAD)是衡量图像中某点相对于其在未畸变图像中对应点的位置偏差的指标。
DRAD计算公式:DRAD可以通过以下公式计算:
$$[ DRAD = \frac{Rd – Ru}{Ru} \times 100\% ]$$
其中,Rd是畸变图像中某点到图像中心的距离,Ru是该点在未畸变图像中到图像中心的距离。
利用MLR计算DPH/DSTV
DPH/DSTV定义:画面高度畸变(DPH)或电视畸变(DSTV)是衡量图像中水平或垂直直线弯曲程度的指标。
DPH/DSTV计算方法:通过已知的MLR(局部径向放大率)和MLT(局部切向放大率),可以计算DPH或DSTV。具体步骤如下:
- 1.建立多项式关系:首先,基于MLR数据,建立描述畸变图像和未畸变图像之间关系的多项式方程。
- 2.计算DPH/DSTV:利用多项式方程,计算图像中特定点的DPH或DSTV值。
多项式方程的应用
多项式方程形式:假设多项式方程具有以下形式:
$$[ y = k_n x^n + k_{n-1} x^{n-1} + \ldots + k_2 x^2 + k_1 x + k_0 ]$$
其中,x代表归一化的Ru,y代表归一化的Rd,kn到 k0是多项式的系数。
导出DPH/DSTV的具体步骤:
- 确定畸变中心:假设畸变中心与图像中心重合。
- 建立畸变模型:使用多项式方程描述畸变图像中点的位置与未畸变图像中点位置的关系。
- 算DPH/DSTV:通过畸变模型,计算图像中特定点的DPH或DSTV值。
图像校正应用
图像校正:利用导出的DPH/DSTV值,可以对畸变图像进行校正,以减少或消除畸变的影响。

4. 讨论
本节讨论了局部放大方法的几个关键假设和验证结果,以及该方法的准确性和应用。
4.1 圆对称性和图像中心与畸变中心重合的假设
在文章的“4.1 圆对称性和图像中心与畸变中心重合的假设”部分,作者讨论了关于内窥镜畸变评估中两个关键假设的验证:一是内窥镜光学系统的圆对称性,二是畸变中心与图像中心的重合。以下是详细内容梳理:
圆对称性假设
- 假设内容:文章中假设内窥镜的光学系统是圆对称的,这意味着可以忽略切向畸变分量。
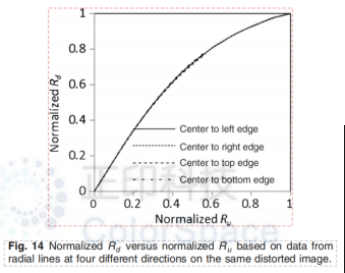
- 验证方法:为了验证这一假设,研究者从图像中心到四个边缘(右、左、上、下)收集了数据,并导出了归一化的Rd与Ru曲线。
- 验证结果:如果这些曲线相互重叠,这表明假设的圆对称性是正确的,即光学系统没有显著的切向畸变。
图像中心与畸变中心重合的假设
- 假设内容:文章中还假设畸变中心与图像中心重合,这是进行畸变评估时的一个关键前提。
- 验证方法:通过比较不同半径上的数据,可以验证畸变中心是否与图像中心重合。
- 验证结果:如果不同半径上的数据导出的曲线一致,这表明畸变中心确实与图像中心重合,从而支持了进行畸变评估的几何模型。
实验验证
- 数据收集:研究者从图像中心到四个边缘收集了34个径向距离数据,这些数据涵盖了从图像中心到边缘的所有区域。
- 数据处理:将这些数据归一化,并绘制了归一化Rd与归一化Ru的曲线。
- 结果分析:通过分析这些曲线的重叠情况,研究者得出了关于圆对称性和畸变中心位置的结论。
结果意义
- 圆对称性的重要性:圆对称性假设的验证对于确保畸变评估方法的准确性至关重要,因为它影响畸变评估模型的选择和畸变参数的计算。
- 畸变中心与图像中心重合的重要性:这一假设的验证确保了畸变评估的几何模型与实际内窥镜的光学特性相匹配,从而提高了畸变评估的准确性和可靠性。
4.2 局部放大方法的准确性
准确性验证的目的
目的:验证局部放大方法在评估内窥镜畸变时的准确性,特别是MLR(局部径向放大率)的准确性。
实验验证过程
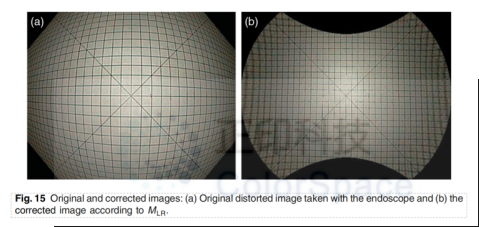
- 1. 图像校正:使用局部放大方法的结果在MATLAB中对同一内窥镜的畸变图像进行校正。
- 2. 比较分析:将畸变图像与校正后的图像进行比较,以评估局部放大方法的准确性。
结果评估
- 校正效果:校正后的图像去除了大部分畸变,表明局部放大方法在畸变评估方面是准确的。
- 误差分析:尽管在图像边界附近仍存在一些误差,这主要是由于边界处的坐标读取精度较低所致,因为边界处的放大率较小、分辨率较低,且光强度较暗。
提高准确性的措施
- 照明条件:通过调整照明条件,可以提高图像边界处的读取精度,从而提高畸变评估的准确性。
- 外部光源:建议使用外部光源以获得更好的照明均匀性和强度,减少来自畸变图像的读取误差。
结论
- 准确性认可:局部放大方法被认为是一种准确的畸变评估工具,可以用于内窥镜图像的畸变校正。
- 方法优势:该方法具有数学上的易理解性和实验上的简单性,且物理意义清晰,有助于医生从畸变图像中解释病变的大小。
4.3 畸变评估所需数据数量和多项式方程格式
数据数量对畸变评估的影响
- 数据量研究:研究了从图像中心到边缘的网格图像数量(即用于推导多项式方程的数据点数量)对畸变评估的影响。
- 实验设置:使用了一个3 mm × 3 mm网格大小的网格目标,放置在离内窥镜末端6.4厘米的位置,并垂直于内窥镜的光学轴。
- 数据获取:从图像中心到右侧边缘,共获得了34个径向距离数据,这些数据来自34个交叉点。
多项式方程的准确性
- 多项式方程:使用不同数量的数据点(18、12、8、6和5个)来获得归一化Rd与归一化Ru的曲线,并与基于所有34个数据点的曲线进行比较。
- 结果分析:所有曲线都与基于所有34个数据点的曲线重叠,表明最少数据数量可以是畸变方程中的未知参数数量,前提是方程格式正确,且目标图像中的交叉点可以清晰读取。
多项式方程的格式
- 方程格式:对于大多数严重的桶形或枕形畸变,五次多项式方程已经足够准确,R平方值大于0.9999。
- 灵活性:实际的方程阶数可以根据所需的R平方值灵活调整。例如,如果所需的R平方值是0.9898、0.9987和0.9998,方程的阶数可以是2、3和4。
- 复杂畸变:对于更复杂的畸变,方程的阶数可以大于5。
结论
- 数据量和方程格式:研究表明,适量的数据点和正确的多项式方程格式对于畸变评估的准确性至关重要。
- 方法适用性:该方法适用于评估具有不同畸变模式的医疗设备,尽管对于不同的畸变模式,方程的具体形式可能有所不同,但推导方法保持一致。
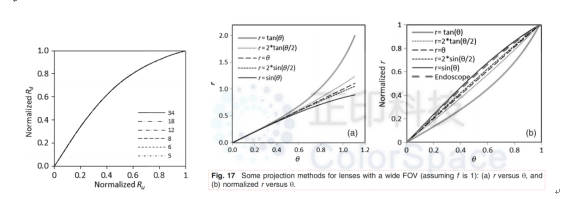
4.4 内窥镜的投影方法
畸变与投影方法的关系
畸变是光学设计中使用的投影方法的结果。理论上,如果已知畸变模式,可以逆向推导出使用的投影方法。大多数消费级相机使用的是透视投影(也称为正交投影),它将物体空间中的直线映射为图像中的直线。然而,由于制造超过100度视场角的正交镜头存在困难,因此会使用其他投影方法,如立体投影、等距投影、等立体角投影和正交/正投影,来设计具有宽视场的镜头,例如鱼眼镜头和内窥镜镜头。
内窥镜的投影方法推导
通过从畸变图像中获取的数据,可以计算出每个交叉点到目标中心的距离(d),并使用这个距离和目标到内窥镜的距离l来计算角度θ。使用公式:
$$[ \theta = \arctan\left(\frac{d}{l}\right) ]$$
计算每个交叉点的角度θ。将得到的θ值和对应的归一化径向距离(normalized Rd)用于绘制归一化Rd与θ的曲线,以此来比较不同投影方法的曲线。
确定内窥镜的投影方法
将内窥镜数据得到的曲线与不同投影方法的理论曲线进行比较,以确定内窥镜设计中采用的投影方法。如果内窥镜的测量曲线与某个理论曲线重合,那么可以确定内窥镜在设计时采用了相应的投影方法。
光学参数的获取
通过最大角度θ,可以计算内窥镜的水平视场角,即 2 *θ。如果知道图像传感器的大小,还可以计算实际的径向距离r,并进一步计算焦距f,使用公式 r = f * sin(θ)
5. 结论
本文回顾了特定的径向畸变测试方法,并开发了一种基于明确实验和数据处理步骤的客观定量测试方法——局部放大方法,用于评估内窥镜成像系统中的径向畸变。据我们所知,这是首次引入局部放大方法来评估内窥镜畸变。
结果表明,该方法能够以高精度描述传统内窥镜的径向畸变。此外,图像校正结果也显示局部放大方法在畸变评估方面是准确的。局部放大方法克服了传统畸变评估方法中估计理想图像的误差,并且比其他畸变评估方法具有优势。
常用的畸变评估方法,如画面高度畸变和径向畸变方法,是积分方法,因为它们根据两点之间较大的距离来评估畸变。局部放大方法则是一种微分方法,可以在任何给定的局部点显示畸变结果。局部放大具有清晰的物理意义。对于在物空间中放置在局部点的无限小物体,其在图像(在传感器或任何显示格式上)中的长度与其实际长度的比率是其局部放大率。
因此,每个局部点的大小信息可以轻松解读,而无需考虑其他点的信息。这一特性可以直接帮助医生在诊断过程中估计病变的大小。局部放大方法是包容性的,这意味着这种方法可以用来推导其他畸变参数。基于局部放大数据,可以推导出画面高度畸变和径向畸变数据。一个设计良好的设置和程序对于准确测量畸变至关重要。关键点包括:
- (1) 测试目标应该是平面的;
- (2) 内窥镜的光轴应垂直于测试目标并与目标中心对齐;
- (3) 测量距离应在景深内适当,以获得足够的数据来推导拟合方程,但避免由于近距离的高放大率和远距离的边缘模糊网格引起的大读取误差。
在我们的研究中使用了内窥镜的自身光源。为了获得更好的照明均匀性和强度以减少来自畸变图像的读取误差,建议使用外部光源。
此外,本研究中使用的内窥镜具有主镜头(即固定焦距镜头)。对于具有变焦镜头的医疗设备,应将畸变确定为焦距的函数。我们的结果表明,五次多项式方程可以很好地描述具有严重桶形畸变的传统内窥镜的径向畸变曲线。畸变图像的图像校正结果表明,我们的局部放大方法在畸变评估方面是准确的。该方法可以应用于评估具有不同畸变模式(桶形、枕形、胡子形等)的医疗设备。虽然其他畸变模式的方程格式可能不同,但推导方法将相同。
总之,局部放大方法是一种定量和客观的内窥镜畸变评估方法。与现有标准相比,它在数学上易于理解,实验上简单,并且具有清晰的物理意义,可以帮助医生从畸变图像中解释病变的大小。
因此,它是一个很好的选择,可以作为国际内窥镜标准,有助于以最少的负担方式促进产品开发和监管评估过程,减少内窥镜制造商和监管机构的负担。
结果,高质量的内窥镜系统可以迅速进入市场。该方法还可以用来促进对性能不佳的内窥镜的快速识别和理解原因,并在制造过程中的质量控制以及临床使用中的质量保证中受益。虽然本研究基于内窥镜成像,但开发的方法可以扩展到任何圆对称成像设备。基于本文的软件将很快开发完成,并将根据要求向公众提供。
联系我们:
如果您有什么问题或想要了解的讯息,可以在下方评论区留言或直接联系我们:marketing@colorspace.com.cn或拨打电话400-886-3881!分享您的看法或提出您的问题!也欢迎点击表单填写您的需求。

Was this helpful?
2 / 0
