对比度分辨率图卡及其分析
介绍-背景-对比度分辨率图-拍摄和分析- 色调响应和SNR -可视化-视觉分析-对比度分辨率动态范围- 色调映射结果-光斑掩模和双图像测量-总结-验证-参考
导言
本页介绍了Imatest对比度分辨率图表和分析(由Imatest 5.0+支持),该图表和分析旨在测量在较大亮度范围内的较大视野中的低对比度对象的可见性。这些测量值表示为对比度分辨率信噪比(SNR CR )和动态范围(DR CR )。它们对汽车和安全行业特别感兴趣。这种动态范围测量方法的灵感来自于Robert Bosch的Ulrich Seger在AutoSens 2016上的演讲。在“动态范围”页中将其与其他方法进行比较。
与标准动态范围测量相比,对比度分辨率结果对未补偿的黑电平偏移、眩光和色调映射引起的误差不敏感,并且可以在宽色调范围内清晰地显示低对比度特征的可见性。
我们正在向相关标准委员会,特别是IEEE P2020汽车系统图像质量小组介绍该图表。我们在AutoSens 2017和Electronic Imaging 2018上描述了该图表。该论文可在此处下载。
背景
相机动态范围(相机以良好对比度和信噪比(SNR)响应的色调范围)是传感器和透镜(以及在某种程度上,信号处理)的函数。现代高动态范围(HDR)传感器拥有令人印象深刻的120 dB(1,000,000:1亮度比)或更高的动态范围,但当透镜放置在传感器前面时,眩光(镜头元件之间反射的杂散光)将系统(相机)动态范围限制为100 dB或更小。(如果您认为您的系统可以做得更好,并且您有数据备份,请写信给我们support@imatest.com。我们将很高兴与您合作)。
耀斑光经常从白色区域中的小的纯黑色区域(“黑洞”或反射图中的光阱)测量,其通常延伸到图像边界之外。Imatest的面纱眩光(这表明对耀斑的敏感性)的旧测量来自Stepchart模块; Imatest 5.0+已将ISO 18844光斑测量添加到均匀性模块。在图像已经被线性化并且黑色电平偏移(如果有的话)已经被去除之后,
面纱眩光=暗电平/白色电平ISO 18844眩光/面纱眩光测量的问题是(1)它们不能直接与图像暗区中低对比度特征的可见性相关,(2)它们往往夸大了由眩光造成的损害(即具有120 dBHDR传感器的照相机在该测量中可能仅显示出50 dB的表观动态范围),以及(3)它们基于主要由多元件透镜中的二次反射引起的光斑起源的不适当模型。来自那里的反射的雾,当它们到达图像传感器时没有聚焦,随着与明亮特征的距离而福尔斯。
标准动态范围测量通常使用透射式灰度阶跃图来进行,该透射式灰度阶跃图具有大于相机的动态范围的密度范围。虽然它们显示了整体密度响应,但它们对于色调映射图像没有给予良好的结果,色调映射图像广泛用于为人类观看而处理的HDR图像。色调映射有选择地调整图像中的色调,使暗区域变亮,使其在动态范围有限的监视器中可见。通过在Imatest图像处理模块中将Matlab色调映射函数与8个图块(默认值)应用于左侧图像,获得了下面右侧的色调映射图像。
| Imatest高动态范围测试图表图像的裁剪,显示色调映射的效果 | |
| 原始 | 色调映射 |
| 密度响应-原始 | 密度响应-色调映射 |
对数像素水平与色调映射图像的曝光(-图表密度)示出了小块之间的低且不一致的差异,这根本不指示小块内的低对比度特征的实际可见性。色调映射通常破坏来自常规灰度图的色调响应测量。
标准动态范围测量也会受到眩光引起的误差的影响,这会增加SNR计算中的信号电平,但来自眩光的信号是虚假的,因为眩光来自测量区域之外的图像特征(通常是明亮的区域)。
对比度分辨率图表的开发是为了克服传统的耀斑/面纱眩光和动态范围测量的缺点。
对比度分辨率图表
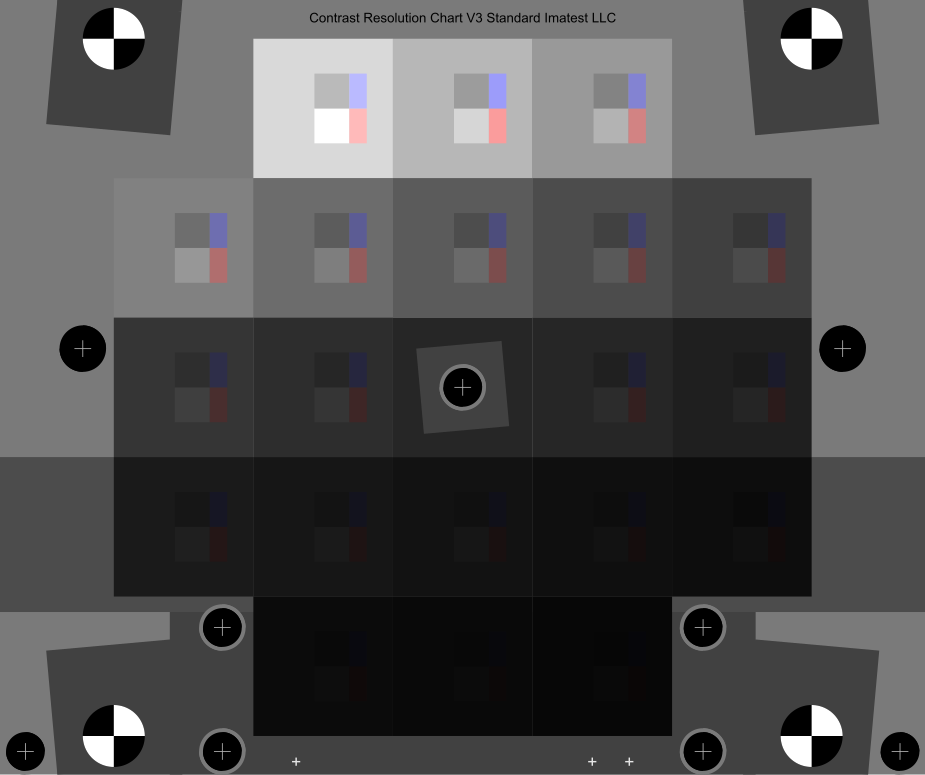
这是一张概念图(与实际图表不同,实际图表的色调范围太大,无法在网页上复制)。
对比度分辨率图表概念图
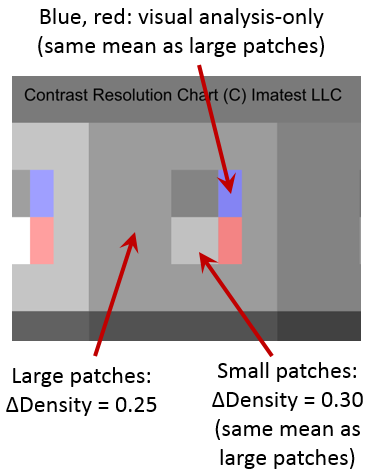
| 物理对比度分辨率表由两层8×10英寸的摄影胶片制成。它包含20个大的贴片,其光学密度(OD)范围从基底+0.15到基底+4.90,步长为0.25OD(5dB),相当于95dB *。(If包括最亮和最暗的小斑块,总密度范围为5.05 OD = 101 dB。)大的片用于噪声测量,因为小的片通常对于良好的噪声统计来说太小。*1 OD(光密度单位)= 20 dB(分贝)= 3.32 f制光圈(或EV或Zones)。在每个大正方形内(如右图所示)有四个小块:浅灰色和深灰色,红色和蓝色。灰色斑块在周围正方形上方和下方为0.15OD。差值0.30 OD(6 dB)为2:1(简单)对比度(100%韦伯对比度)。浅灰色和深灰色斑块的平均密度与周围灰色斑块的密度相同,以最小化对色调映射的影响。(The同样适用于蓝色和红色斑块。)使用小的亮灰色和暗灰色块的像素级进行详细的定量分析;蓝色和红色块仅用于视觉估计)。 |
| 在成像文献中使用了三种对比度定义。重要的是要知道使用哪一个。 亮度Lmax和Lmin,对应于对比度分辨率图表的内部浅灰色和深灰色斑块,韦伯对比:第0章第1章 简单对比:第0章第1章 迈克尔逊对比度(调制):第0章第1章 (used对于MTF。0 ≤调制≤ 1) |
许多最近的HDR图像传感器要求120至150dB的动态范围。这可能是孤立的传感器的情况,但具有真实光学系统的真实的相机的动态范围甚至不接近。实际限制最多为100dB,受到来自图像场内部或附近的明亮区域的眩光的限制。
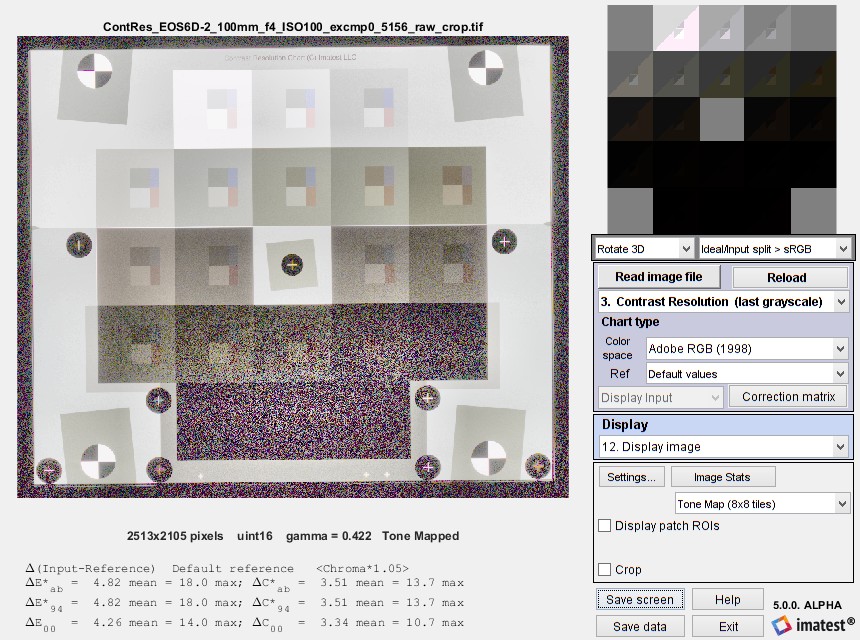
这是佳能EOS-6D拍摄的图表图像(全画幅数码单反相机),高品质100 mm微距透镜,ISO 100,原始拍摄格式,转换为DNG文件(因为LibRaw可能无法从Canon CR2文件中正确删除黑电平偏移(底座)),转换为48位Adobe RGB TIFF文件进行分析(没有锐化或降噪),然后裁剪。下面的图像是一个8位JPEG从非常大的48位TIFF文件派生。
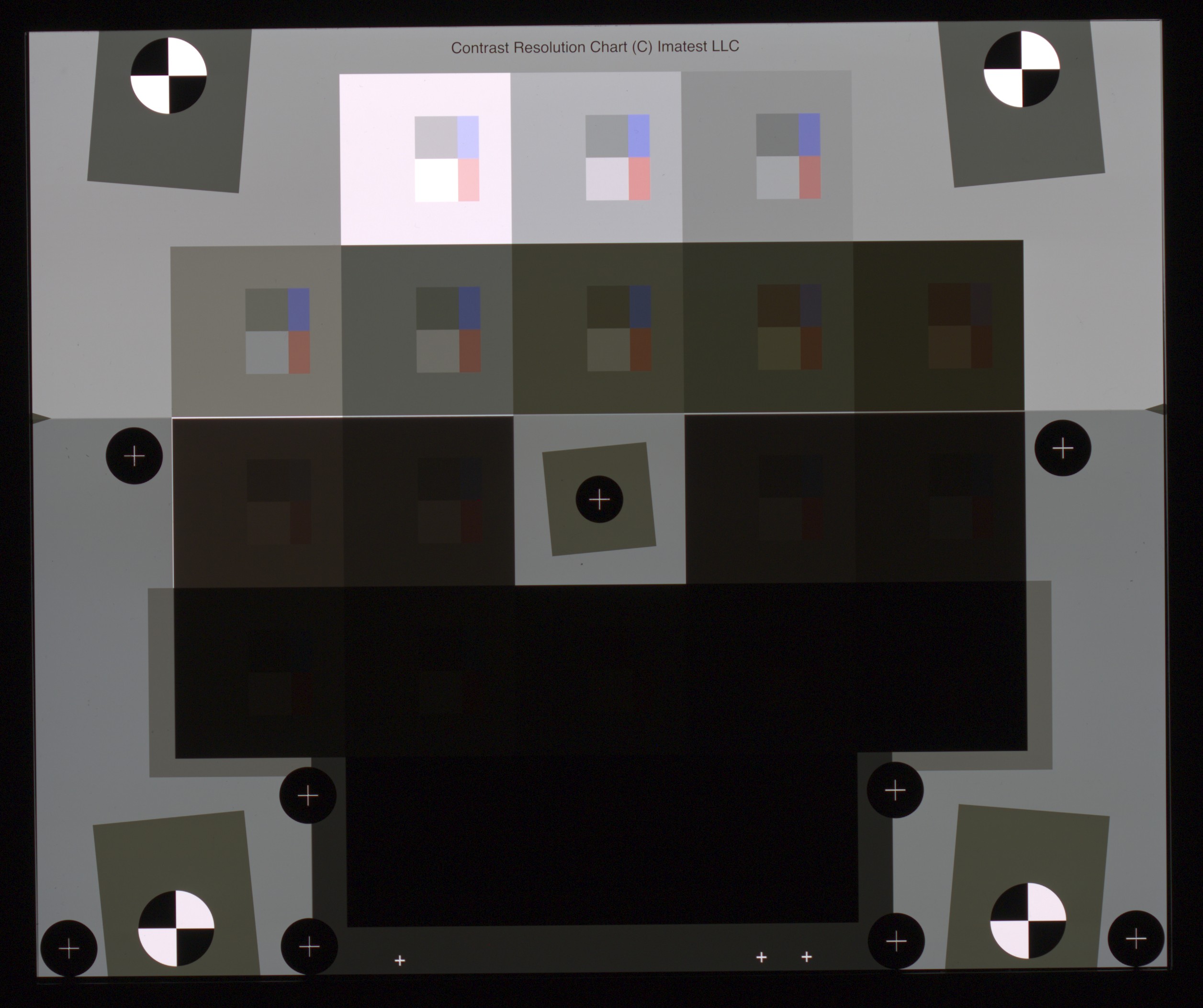
对比度分辨率图表图像,最初以RAW格式捕获。 点击图像打开填充大小的图像,可以下载进行分析。
拍摄并分析图表
对比度分辨率图表,可以从Imatest商店购买,是一个双层8×10英寸(20x25cm)的透明度,需要背面照明。虽然任何相对均匀、不闪烁的灯箱都可以工作,但我们推荐ITI灯箱,它非常均匀(97%),可以在很宽的范围内调暗(300:1),并具有两种色温(通常为3100和5100K,但其他组合可以定制)。
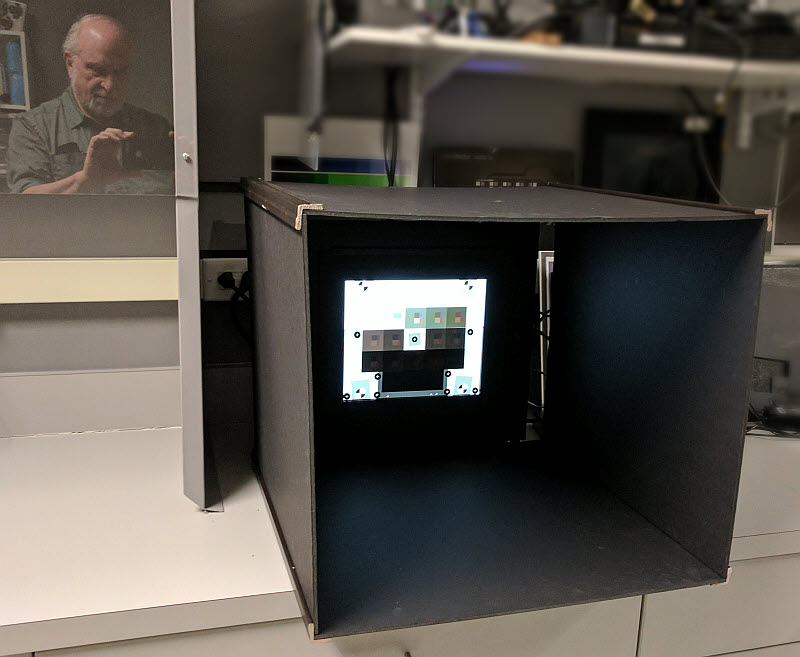
图表应在完全黑暗的环境中拍摄。必须小心避免任何光线反射回图表的前表面。我们通常用一个由黑色泡沫板和角成型制成的盒子包围灯箱,以防止局部反射。我们正在考虑用遮光材料在盒子里做衬里,以提高吸光率。摄像头后面的区域应该尽可能暗。应该避免穿浅色衣服–因为它会把光线反射回图表上–。
测试设置显示灯箱和图表周围的黑匣子
将图表框起来,使图像中的图表高度至少为400像素-对于高分辨率系统,更高的高度是理想的。在典型的高分辨率系统中,图表应该填充垂直或水平场的大约40%。我们建议您避免用图表填充图像,因为透镜的光线衰减可能会降低测量精度。
Imatest 5.0+中的交互式Color/Tone Interactive和支持批量处理的Color/Tone Auto模块中包含对比度分辨率图表的分析。
| 反思可能是个严肃的问题。我们建议用黑色天鹅绒或羊毛覆盖相机附近的所有东西,透镜除外。来自透镜本身的反射是难以避免的,但通过放置相机,使其反射位于图像的确切中心(对于圆形布局的图表),可以减轻其影响。这会将反射放置在密度面片的外部。在右图中,图表中心下方的反射破坏了贴片15的测量。拍照时很容易错过,但当图像变亮(在这种情况下是色调映射)时,它可能会很明显。相机需要稍微抬起去得到反射出密度补丁。 |
要在Color/Tone Interactive中运行图像,
- 单击Imatest主窗口中的“Color/Tone Interactive(颜色/色调交互)”按钮,
- 选择7。从读取图像文件按钮下方的下拉菜单中的多行灰度和彩色图表。
- 选择图像。这将打开“颜色/色调交互式特殊图表”选择窗口。
- 选择13。对比度分辨率。
- 参考源应该是默认值或我们可以提供的包含20个大面片密度的文件名。
- 单击“确定”(OK)。
对于后续运行,您可以简单地单击3。对比度分辨率(最后一个灰度级)在“颜色/色调交互式”窗口中(这将消除“颜色/色调交互式特殊”图表选择)或读取图像文件(如果为3)。对比度分辨率…显示在下拉菜单中。你只需要按7。多行…(如果要更改图表类型)。
要在Color/Tone Auto(Color/Tone Interactive的非交互式、支持批处理的版本,应首先运行以确保设置正确)中运行图像,
- 按下Color/Tone…右侧的Setup按钮(Imatest主窗口的左中部)。
- 图表类型应设置为7。多行灰度…或3.对比度分辨率…(如果上次运行使用了对比度分辨率图表)。
- 特殊(多行)灰度图类型应设置为13。对比度分辨率。
- 唯一相关的图是B&W密度和白色球,噪声/SNR(可选择两个图)和图像图。(The其他都是为了颜色)。
- 单击“确定”(OK)。颜色/色调:对比度-分辨率将出现在Imatest主窗口中。
- 按此按钮运行“颜色/色调”。更多详情请参阅完整的颜色/色调说明。
当在ROI设置中选择了36片动态范围和对比度分辨率图表的自动检测时,图表检测是完全自动的。自动检测变得非常强大(也可以手动选择)。这是自动检测(或手动选择)后的微调窗口。如果调整正确(如果需要,可以添加失真),在快速模式下单击“是,继续”(或“是,继续”)。在交互性很强的Color/Tone Interactive中,设置总是可以稍后更改。(For颜色/色调,需要在运行前进行设置。)
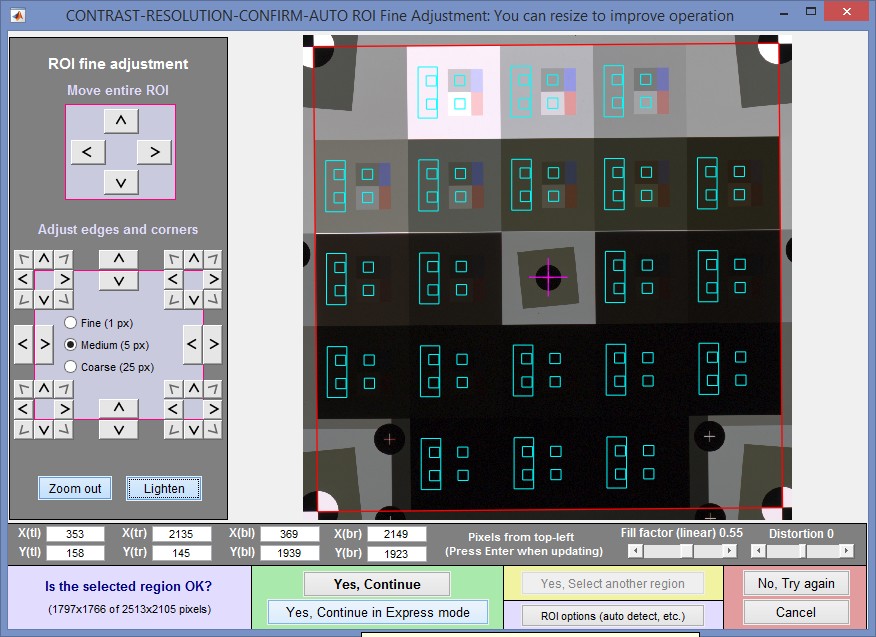
对比度分辨率微调窗口
为二十个大面片中的每一个选择五个区域。大矩形用于均匀灰色区域:如果你已经正确地构建了图像,它应该足够大以获得良好的噪声统计。右边的两个小矩形分别表示深灰色和浅灰色区域。大矩形内的两个小正方形用于从浅深灰色斑块测量中减去垂直不均匀性(由于眩光)的影响。
对比度分辨率分析所关注的显示设置为
7. 密度和白色平衡 11.噪声分析 12.显示图像
结果和可视化
阶调响应和信噪比(SNR)
以下是音调响应和信噪比(SNR)的关键结果。
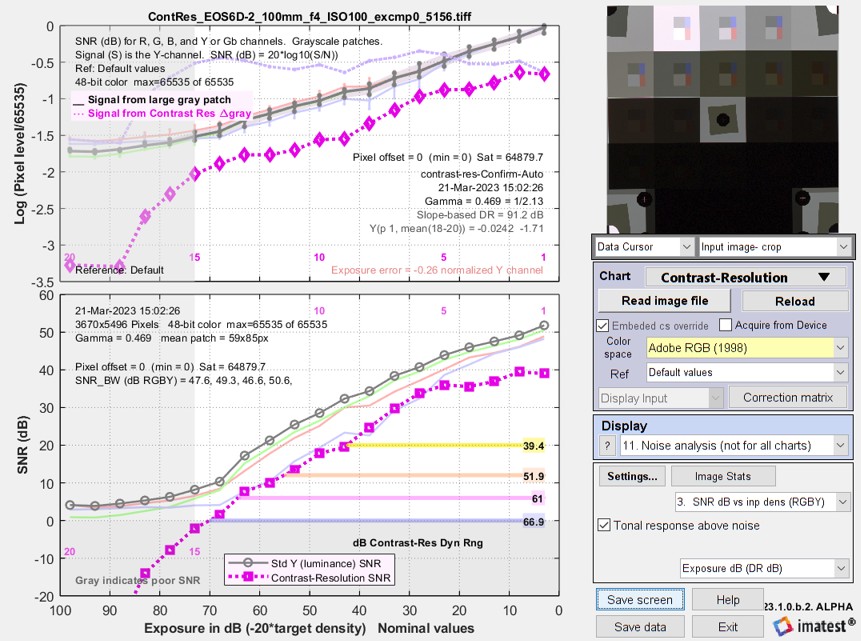
来自RAW Canon EOS-6D图像的48位TIFF文件的色调响应和SNR
上图(对数像素级,即,色调响应)-细的红色、绿色、蓝色和灰色(用于亮度(Y)通道)曲线来自大的灰色斑块。它们对应于动态范围图表的标准结果。灰色曲线中的小尖峰(如右图所示)是较大灰色斑块内的浅灰色和深灰色斑块的响应。
强洋红色曲线(-♦-)表示亮-暗内部灰色斑块的差值信号ΔS = S light − S dark 。这是用于确定这些块的可见性的信号的非常好的表示。较弱的洋红色曲线(-)是归一化为常规信号ΔS/S mid (大灰斑的电平)的差信号。归一化的差信号保持相对恒定,直到贴片16,在贴片16处,它开始突然下降。
| 大灰度块响应S mid 和ΔS之间的差异-一点数学令R mid 为大灰色斑块的反射率。浅灰色和深灰色内部斑块(R 1 和R 2 )被设计成使得它们的平均反射率(R 1 + R 2 )/2 = R mid 并且它们的比率R 1 /R 2 = 2。当 1=4/3 和 2=2/3 时,这是满足的。图像用近似编码伽马(γ)曲线S R γ 编码,其中对于标准颜色空间,例如sRGB或Adobe RGB,γ 1/2.2 = 0.4545。由于音调响应图(上图)具有对数y轴,因此我们真正想要的是ΔS = S 1 -S 2 和S mid 之间的比率的log 10 。Δ/=(1−2)/=((4/3)–(2/3))/=(4/3)−(2/3)对于编码 1#最后,log10(Δ/)=log10(0.3080)=−0.5114Δ/=log10((4/3)–(2/3))这是深灰色曲线(S mid )和对比度分辨率信号的磁曲线之间的差Δgray = ΔSin(上面的)色调响应曲线。此差异显示为淡紫色线,该线保持在-0.5附近,直到在补丁16附近崩溃。 |
下图(对比度分辨率SNR和动态范围)-强洋红色曲线(-带有方形标记)是从浅-深灰色差异信号ΔS得出的信噪比。这被称为对比度分辨率SNR,SNR CR *。彩色水平线是对比度分辨率动态范围DR CR ,如下所述。这些是“对比度分辨率”分析的最重要结果。图背景是灰色的,其中SNR下降到0 dB(S/N < 1)以下,以指示图像质量太低而无法看到细节。
* SNR CR 与对比噪声比CNR密切相关。
为了理解这些曲线,我们需要仔细观察图像,并且我们需要处理在正常观看条件下大多数显示器中暗斑的可见性差。
可视化
对比度分辨率分析的一个关键属性是,它能够清晰地显示较大视场内的低对比度对象。这是不可能的标准灰度图表与连续补丁。
| 可以可视化补丁内容的一种方式是通过选择显示图像,然后选择色调映射(应用Matlab色调映射函数)或常量补丁选项之一。色调映射(如右图所示)不会产生一致的结果-它受到噪声和最小像素水平的影响-但它很有趣,因为为人类视觉设计的汽车摄像机(摄像机监视器系统)的输出几乎肯定会进行色调映射(尽管可能使用更复杂的例程)。色调映射使暗块变亮,从而可以可视化内部特征。它通常使大面片之间的差异变平,同时保持较小内部面片的对比度。色调映射图像(仅显示): 显示设置不用于定量分析 |
恒定色块(仅在Color/Tone Interactive中可用)提供了更好的显示效果。“常数”面片显示选项(在“设置”区域的小下拉窗口中)具有类似的结果。
- 恒定补丁(xyY)图像被转换为xyY颜色表示,其中Y是(线性)亮度。此计算使用图像颜色空间(通常为sRGB,但偶尔会使用Adobe RGB)。计算每个面片的Y的平均值,然后将整个焦度除以平均值(Y)并缩放以供显示。这通常会为颜色空间图像提供最佳显示,但结果与常量面片(简单)非常相似。
- 恒定面片(L*)图像转换为CIELAB L*a*b*(使用图像颜色空间)。针对每个块计算L* 的平均值,并用于缩放图像以获得恒定的平均L*。暗区中的斑块通常是不饱和的。
- 常数面片(简单)计算每个面片的平均值,然后将整个面片除以平均值并缩放以显示。不应用关于颜色空间或线性度的假设。
恒定面片图像(来自xyY中的Y):是功能可见性的良好指示器。
在此显示的每个补丁中显示了几个数字。这里是一个典型的补丁(#10)。
| 线 | 内容提要 (patch #10) | 描述 |
| 1 | 苏0.108 0.291 | S1表示信号。请注意,图例中的“顶行”是指补丁的顶行(而不是整个图表)。补丁#10中的第一个条目(S1 = 0.108)是归一化为1.0的补丁的信号。第二个条目(ΔS/S1 = 0.291)是较大斑块内的小的浅灰色和深灰色斑块之间的差异,归一化为第一个条目中的信号(S1)。Log 10 (S1)和log 10 (ΔS/S1)显示在音调和噪声(或SNR)图的上图中。Log(0.291)=-0.536。这是大灰度斑块信号和对比度R Δ灰度信号之间的差异。 |
| 2 | 10 | 指示补丁编号(10) |
| 3 | 26.7 7.76 | 信噪比。噪声N是在大面片中计算的。第一SNR(SNR(S))的信号是大补丁(第1行中的S1)的平均像素水平。第二SNR的信号(SNR(ΔS)= SNR CR )是小的亮斑块和暗斑块之间的差ΔS。该数字涉及具有2:1(100%Weber)对比度的两个灰色斑块可以被区分的程度。SNR(S)和SNR CR 在音调和噪声(或SNR)图的下图中以对数形式显示(作为简单的比率或dB)(分别为—和- — -)。SNR CR 与对比噪声比(CNR)密切相关。 |
视觉分析
通过比较恒定补丁图像与上面的色调响应/SNR图,我们可以了解很多关于对比度分辨率的信息。
从上面的常数块图像,我们做了初步的观察。
- 内部贴片对于贴片13是清晰可见的,其中SNR CR = 2.43。
- 在块14中,内部块是弱可见的并且有噪声,其中SNR CR = 1.19。
- 在块15中难以看到内部块(仅因为它们类似于具有更好SNR的区域中的块而可见)。
- 在16阶及以后的人中,内部的补丁是不可见的。
注意,归一化信号ΔS/S1通过贴片16保持相当一致,并且仅对于贴片15及以上严重下降。这是一个非常清楚的指标,表明归一化信号不是性能的良好指标。对比度分辨率SNR,SNR CR 要好得多。
对比度分辨率动态范围
基于SNR CR 的对比度分辨率动态范围图示
对比度分辨率SNR(SNR CR )可以用作定义对比度分辨率动态范围(DR CR )的基础,对比度分辨率动态范围是SNR和/或信号保持在指定值以上的音调范围。亮DR CR 和暗DR CR 限值的定义不同,因为亮补丁的噪声非常低,因此仅使用信号。
Dark DR CR 限值是SNR CR 在6至12 dB(2:1至4:1)范围内时的最小曝光,以获得良好的视觉辨别力。DR CR 使用与标准Imatest动态范围计算相同的SNR水平定义,对于“高”、“中高”、“中”和“低”质量水平,分别为20、12、6和0 dB(S/N = 10、4、2和1)。(这些说法有些乐观。)
用于定义暗DR CR 限制的SNR值可以针对特定应用进行调整。例如,如果感兴趣的是较低对比度特征,则可以增加用于计算DR CR (基于图表图像)的SNR值。
光DR CR 限制是排除饱和区域的最大曝光,其中对比度太低而无法进行良好的视觉辨别。它基于每个大贴片的两个信号差:Δ S LM = S light -S middle 和Δ S MD = S middle -Sdark,其中中间表示大的中间灰色斑块,亮和暗分别表示小的亮和暗斑块。该算法
- 找出所有贴片的Δ S LM 和Δ S MD 的最大值。将这些值称为Δ S LM (max)和Δ S MD (max)。
- 从最轻的斑块开始,找到第一个斑块,其中(A)Δ S LM ≥ 0.1*Δ S LM (最大值)或(B)Δ S MD ≥ 0.1*Δ S MD (最大值)。
- 如果条件(A)和(B)均满足,则DR CR 上限是对应于贴片的曝光量。
- 如果仅满足一个条件((A)或(B))(通常仅为(B)),则DR CR 上限是当前和下一个补丁的曝光的平均值。这通常比当前贴片低约2.5dB(对于标称5dB贴片差异)。
最后,DR CR =浅色DR CR 限值-深色DR CR 限值在上图中显示为4条水平线:- –
I. A. Cunningham和R. Shaw描述了与该SNR CR 类似的称为SNR Rose 的测量,并且指示对于对象的可靠检测需要5或更大的值。从这些结果来看,似乎低至2的较低SNR CR 可能是足够的(尽管是边缘的),至少对于2:1对比度块。需要做更多的工作来确定一个好的下限,这个下限很可能接近论文中的值5。我们最近发现维基百科上描述对比度分辨率和对比度噪声比(CNR)的页面缺乏实用的测量方法。
色调映射结果
| 查看色调映射图像的结果是有益的。为了获得这样的图像,我们使用Imatest图像处理模块将具有8个图块的默认值的Matlab色调映射算法应用于上述图像。色调映射图像,从上面的图像导出, 缩小到1000像素宽上图(下图)中的色调曲线与原始图像非常不同。色调响应已被平坦化,使得伽马(灰色区域中的平均斜率)已从0.422减小到0.0734-一个无意义的低值。但归一化的浅深灰色差异信号ΔS/S(细洋红色虚线:- )和下图中的浅深灰色差值信噪比ΔS/N(强洋红色曲线-带有方形标记)相当接近。 |
这些结果清楚地示出对比度分辨率测量(尤其是基于差异的信噪比ΔS/N)受色调映射的影响非常小,即,可以在音调映射系统中进行良好的测量。
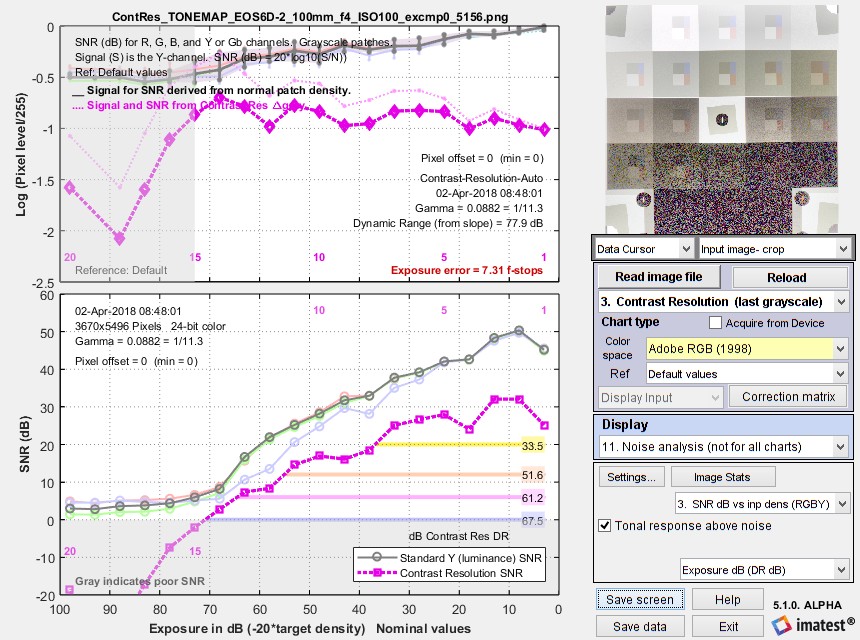
来自RAW Canon EOS-6D图像的色调映射图像的色调响应和SNR
当应用色调映射时噪声和SNR相对稳定的原因是Imatest噪声计算对于由色调映射创建的感兴趣区域内的非均匀照明是相当鲁棒的。噪声通常相当于平滑(平坦)区域中水平的标准偏差(σ),但这种简单的计算可能会将非均匀性误解为噪声。Imatest在计算噪声之前从区域中减去对平均水平和垂直像素水平的二阶拟合-有效地从计算中去除非均匀性。通过运行Imatest图像统计程序可以观察到简单计算和非均匀性校正计算之间的差异。
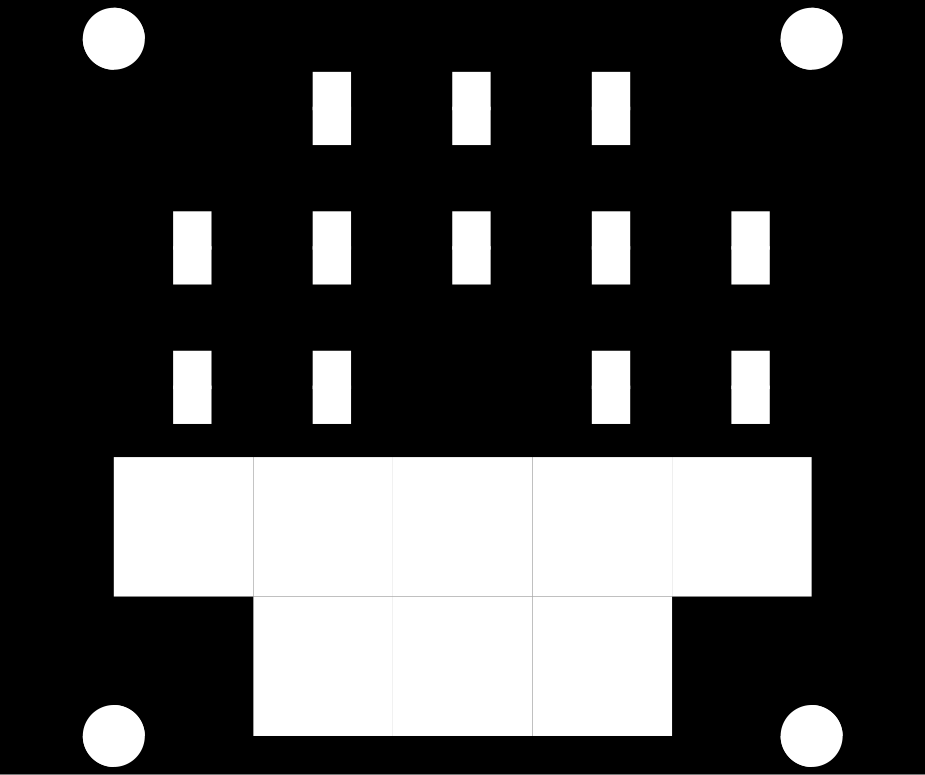
光斑掩模和双图像光斑测量
在2021.2中,我们增加了对光斑蒙版的支持,这大大减少了对比度分辨率图表测量中的光斑,实现了两个动态范围测量(代表正常和低光斑)以及光斑(眩光,即杂散光)测量。面罩的图像,它紧紧地适合在框架,持有图表,显示在右边,下面。圆形开口(用于配准标记)由光学密度为1.2的中性密度凝胶过滤器覆盖,以最大限度地减少眩光,并(在大多数情况下)允许自动区域检测。自动曝光不应用于此方法:大多数自动曝光算法导致最亮的片变得曝光过度,有时是严重的。强烈建议手动曝光控制。如果可能的话,应该设置曝光,使补丁1的最亮区域(内部正方形和外部背景)饱和,但较暗的内部正方形不饱和。
| 对比度分辨率概念图 | 对比度分辨率光斑蒙版 |
当图像被掩蔽时,通常从每个块的左侧计算的信号被两个较小(较亮和较暗)正方形的平均值替换,并且噪声从两个正方形中的一个(较亮的正方形,除了顶行)计算。除了一个主要差异外,大多数结果在使用和不使用面罩的情况下相似。使用遮罩可以大大减少光斑,这可能会增加“动态范围”,但最重要的是,底部行(面片18-20)中与光斑灯光密切相关的对数像素级别的平均值会减少。光斑测量是在没有掩模和有掩模的情况下测量的底行中的对数像素水平的差异。
更多的细节可以在面纱眩光AKA透镜耀斑找到。
总结
我们已经证明,对比度分辨率图表可以清楚地显示低对比度物体的可见性(使用具有2:1透射比的小块(0.3光密度差; 100%韦伯对比度)。与标准灰度级阶梯图不同,它适用于色调映射图像,并且对眩光和未补偿的黑色电平偏移引起的错误不敏感。
对比度分辨率SNR = SNRCR = ΔS/N,基于明暗分块差异,可很好地显示对比度相似的明暗物体的可见性。当SNR CR 大于2至4(6- 12 dB)范围内的值时,可以有效地区分对象。
该标准已被用于建立一组对比度分辨率动态范围DR CR 测量,其被定义为场景亮度(曝光)的范围,其中具有0.3的OD差的小对象具有SNR CR > n,其中n = 10、4、2或1(20、12、6或0 dB)。10是“高”质量; 1表示低质量,其中无法区分对象。对于可区分的对象,n在2至4的范围内。
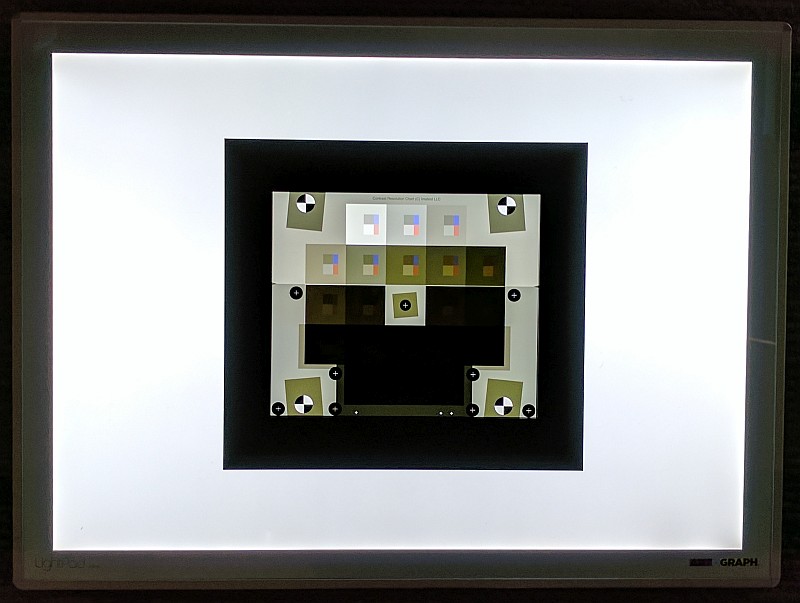
17×24英寸Artograph Lightpad上的对比度分辨率表 用于可选的遮蔽眩光测量
对比度分辨率图表也可以安装(最好没有框架)在一个大的灯箱上,如17×24英寸Artograph Lightpad,以测量面纱眩光,这将由无光和有光环绕的图像之间的测量差异(SNR(ΔS)的差异)表示。
Verification
本页面中使用的图像中较暗的斑块不包含我们获取的图像中的可见细节。这自然会引出一个问题,图表本身是否存在细节?这需要一些努力来验证。我们所做的是屏蔽掉图表底部两行以外的所有内容(以最大限度地减少耀斑光的雾化),然后获取一些图像。这里的结果表明,最暗的补丁确实包含细节。
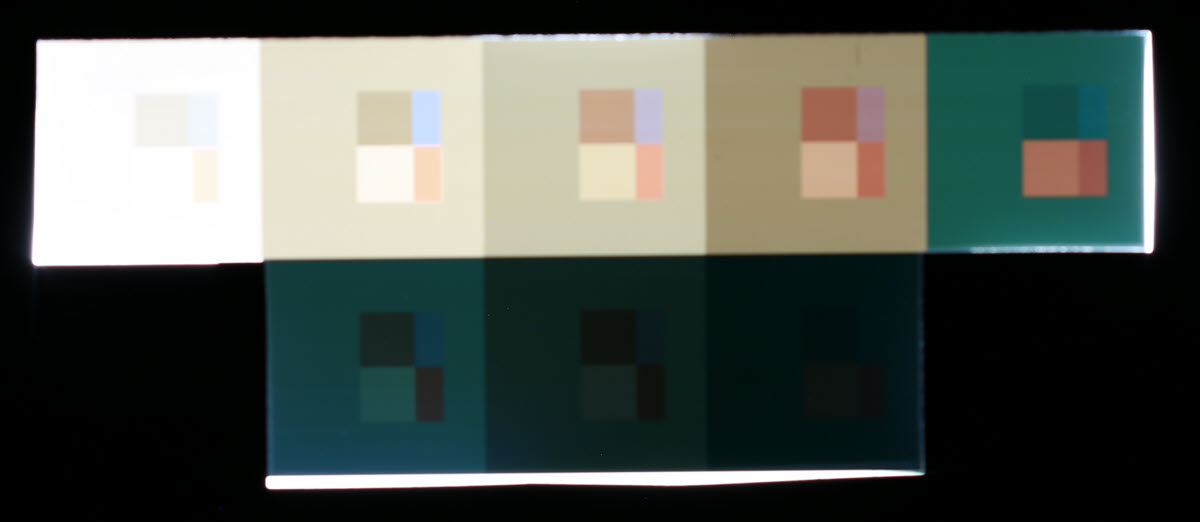
底部两行(其他行被掩蔽),正常曝光
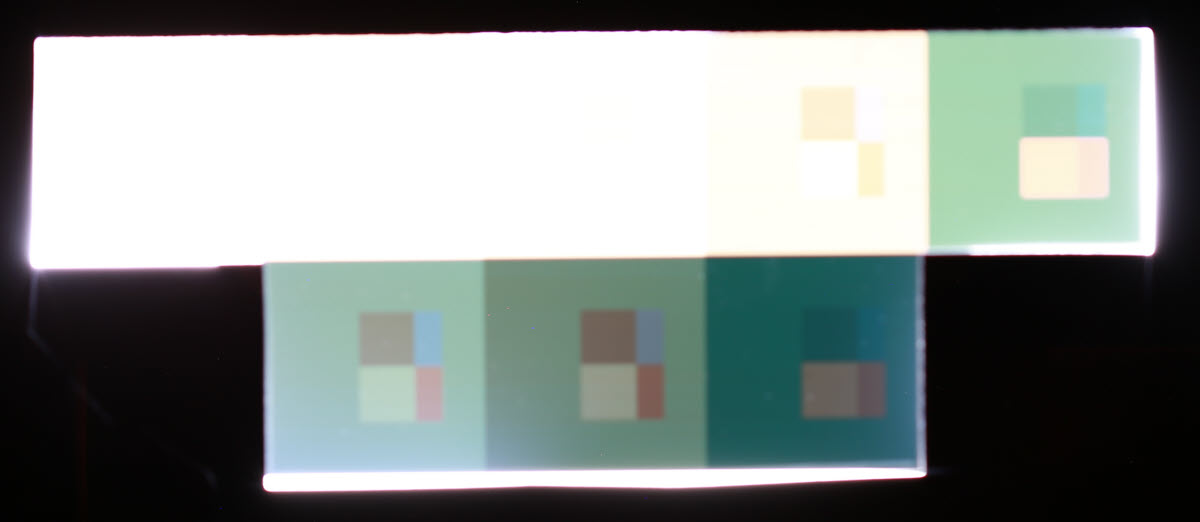
底部两行(其他行被遮盖),极度曝光过度 请注意,在底行中可以看到来自眩光(来自薄的未掩蔽条带)的一些不均匀性。
这些图像清楚地表明,信息存在于最暗的斑块中。注意到一些变色。这来自我们的过程,在非常黑暗的补丁中有一些问题。它对结果的影响很小,并且在正常观看条件下足够明亮的补丁中不可见。
使用传统的ISO15739 标准已不适应,对于 ToneMapping 技术的多帧合成图像进行动态范围测试
当使用Tone Mapping技术处理多帧合成图像时,会对动态范围(DR)的测量和分析产生显著影响,并可能引发一些问题。以下是Tone Mapping技术对动态范围分析的影响、可能出现的问题以及一些解决方案:
影响和问题:
-
对比度和亮度的非线性调整:Tone Mapping通过调整图像的对比度和亮度来增强视觉细节,这可能导致传统的动态范围测量方法无法准确反映图像的真实动态范围。
-
全局对比度的降低:Tone Mapping通常会降低全局对比度以避免高光部分过曝,这可能会使得动态范围测量结果低于实际值。
-
细节丢失:在极端的Tone Mapping下,一些细节可能会丢失,尤其是在暗部区域,这会影响动态范围的质量和可见性。
-
测量不一致性:由于Tone Mapping算法的不同,同一图像在不同软件或设置下可能会产生不同的结果,导致动态范围的测量结果不一致。
-
信噪比(SNR)的变化:Tone Mapping可能会增加或减少图像的噪声水平,这会影响信噪比的测量,进而影响动态范围的评估。
解决方案:
-
使用专门的测量工具:使用如Imatest等专门设计的工具进行动态范围测量,这些工具可以更准确地评估Tone Mapping后的图像。
-
标准化Tone Mapping参数:在进行动态范围测量之前,应该使用标准化的Tone Mapping参数,以减少不同设置对测量结果的影响。
-
对比度分辨率图表:使用对比度分辨率图表(Contrast Resolution chart)来评估Tone Mapping图像的动态范围,因为它能更好地反映图像在不同对比度水平下的细节可见性。
-
多曝光图像处理:在多帧合成图像时,使用多曝光图像处理技术(如曝光合并)来保留更多的细节和动态范围,而不是单纯依赖Tone Mapping。
-
原始数据测量:尽可能从原始图像数据(RAW)进行动态范围的测量,因为原始数据在Tone Mapping之前包含了更多的信息。
-
场景参考信噪比:使用场景参考信噪比(SNRscene)来评估图像质量,因为它考虑了场景亮度,可以更准确地反映人眼对图像质量的感知。
-
人眼视觉模拟:在评估动态范围时,考虑人眼对相对亮度差异的感知,使用f-stop噪声或场景参考SNR来更接近人眼的视觉体验。
-
算法优化:开发和使用优化的Tone Mapping算法,这些算法可以在增强图像视觉细节的同时,尽可能保留原始图像的动态范围信息。
通过上述解决方案,可以在一定程度上缓解Tone Mapping技术处理多帧合成图像时对动态范围分析的影响,并提高测量结果的准确性和可靠性。
Was this helpful?
2 / 0
