2023年5月24日
—— 本文部分内容节选自【大话成像】
车载摄像头在行车安全、智能驾驶等方面发挥着重要的作用,而其图像质量的好坏直接影响着车辆识别、环境感知等功能的准确性和可靠性。因此,车载摄像头图像质量的标准化尤为重要。
P2020标准内容更新
IEEE-SA P2020汽车成像标准是一份针对车载摄像头图像质量的标准文档,于22年7月发布了初稿草案。相比于2018年发布的白皮书,初稿最大的变化是将CSP(Color Separation Possibility)移除出了标准,并且暂未将CDP(Contrast Detection Probability)列入到P2020标准初稿中。这也表明业内对于机器视觉的图像质量标准化仍存在争议。
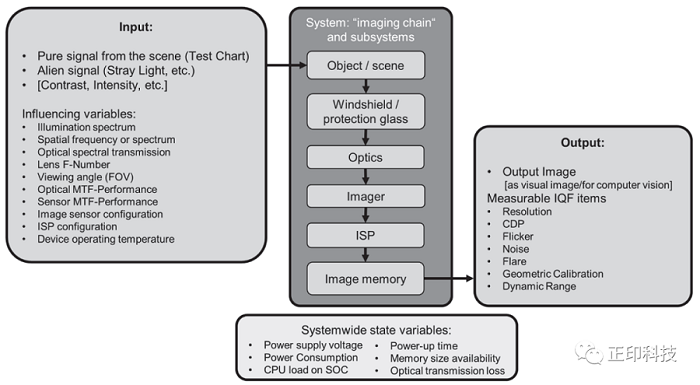
根据P2020图像质量系统模型,图像质量测试包含了眩光(Flare)、几何校准验证(Geometric Calibration)、噪声(Noise)、分辨率(Resolution)、闪烁(Flicker)和动态范围(Dynamic range)等项目。
颜色相关的项目,如色差(Color Error)、色度噪声(Chroma Noise)等,并未被纳入其中。这是与其他图像质量标准最大的不同之处。
此外,从车载摄像头的成像系统模型来看,包括了风挡玻璃/保护玻璃,这也颇具汽车特色。在全系统仿真时,需要让风挡玻璃公司提供光学参数。
车载摄像头的图像质量受到的主要输入因素如下图所示。
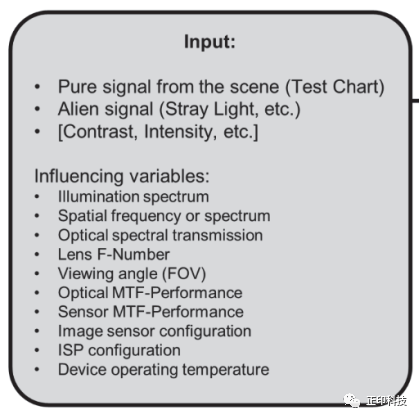
其中,比较有趣的是sensor MTF和Stray light。 Sensor MTF是指sensor在微透镜下的聚光性能,而Stray light为入射光经过镜头折射成散射光产生的影响。这两项都是以前的CPIQ和P1858等标准所没有涉及到的。
FLARE类型及来源
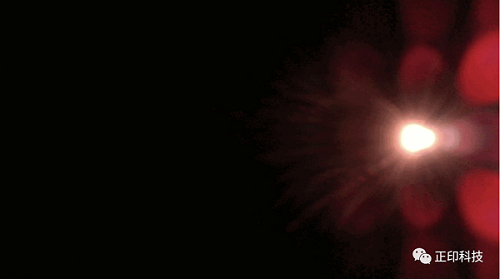
在P2020标准初稿中,Flare(眩光)被放在了测试第一项,毕竟它可以说是影响车载摄像头图像质量最严重的一个因素。车载摄像头在夜晚被对面车大灯的直接照射,或者阳光的低角度直射时,会产生不同类型的flare。这些类型包括:
1. Veiling Flare和鬼影:

2. 光束 Flare:

3. 孔径( Aperture)Flare:

4. 花瓣( Petal)Flare:
 |  |
其中,造成这些Flare的原因有13种,包括:
1. 镜头组的内部反射
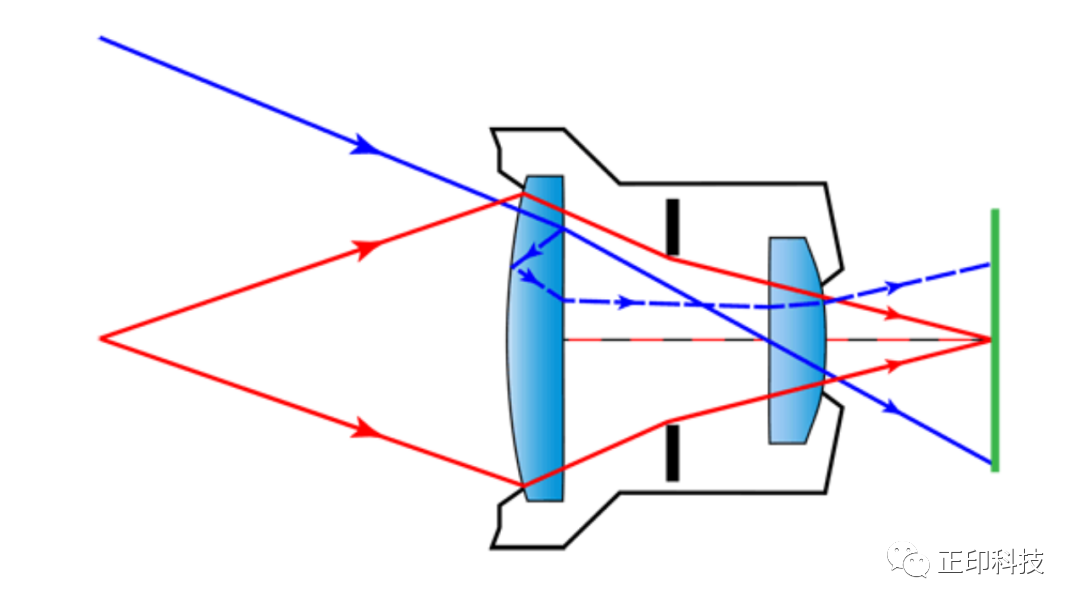
如上图所示,红色光路是直接汇聚在sensor上,而蓝色光路是在镜片底部反射。
2. 模组内部污染造成
模组内部会有油渍,脏污,指纹,灰尘等污染,都会造成光线的反射。
3. 镜头镀膜质量不良
4. 镜头玻璃或者塑料材料内有气泡
5. 镜头光学胶合剂
6. 镜筒和其它的内部部件表面
7. sensor的 cover glass反射
这种也很常见,经常造成IR filter厂、sensor 厂、镜头厂和模组厂互相推诿责任,不过最后可能还得模组厂想办法,调整IR filter的参数,改善这种反射。
8. sensor的铜线( Bond Wire)
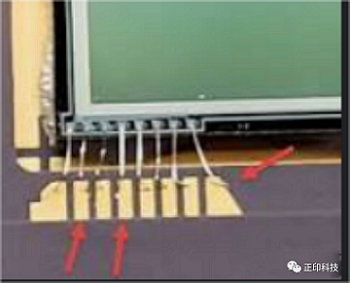
9. 这些铜线( Bond Wire)把 sensor连接到 PCB上,他们也是反射光线的来源,跟封装方式也有关。
10. 挡风玻璃
11. IR filter
IR的通过频率会对反射造成很大影响,但是从机器视觉的角度来说,一般会选择高一些截止频率的IR,这就对模组厂的工艺水平要求更高。
12. 光圈造成的反射
13. sensor表面的反射
sensor厂都会镀防反射coating,反射率也都会提供指标。
P2020中FLARE测试方法
方法 A:
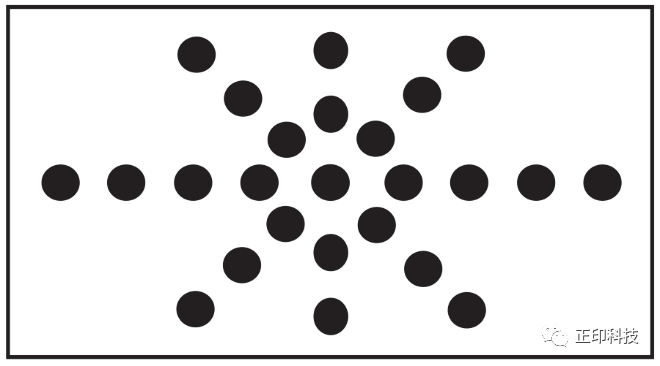
P2020的flare测试是建立在ISO18844:2017的基础上的,在一个白底的测度图卡上开若干圆孔(黑色圆点部分)。
在测试卡背面用强光打上背光,两侧加漫射发光灯板:
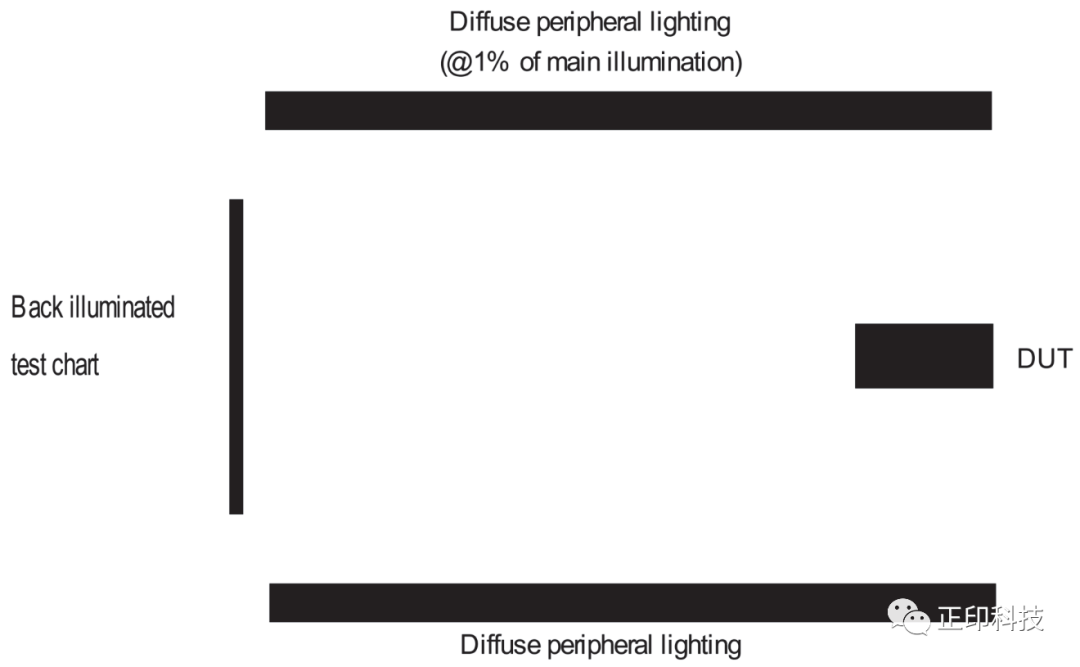 | 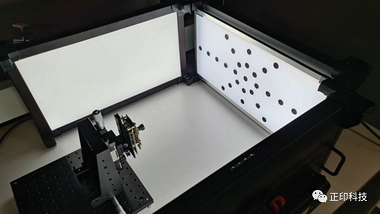 |
被测设备(DUT)拍摄测试卡,然后根据如下公式算F:
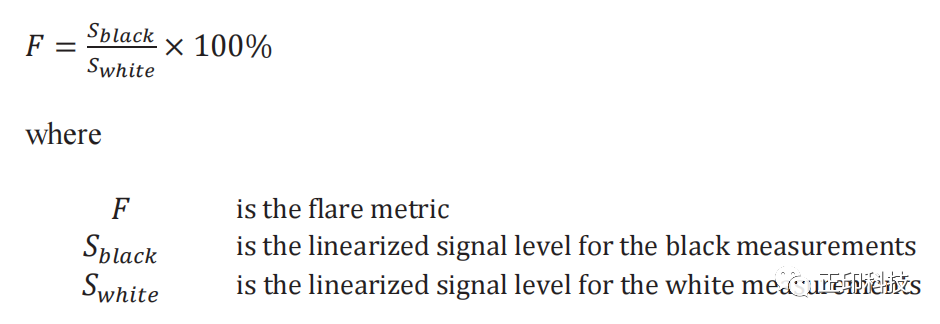
这种测试方法比较简易并且成本较低,该测试涉及在测试卡上测试白光亮度和黑点反射率的变化。在可见光谱(VIS)范围内,白色亮度变化必须小于 5%,如果被测设备(DUT)检测到红外(IR)光,则还必须测量辐射光谱上的变化。如果 DUT 检测到黑点,则可见光和红外光的黑点反射率都必须小于 0.03%。透射率图表中黑点的光学密度必须至少为 OD4.0。可以使用光陷阱代替黑点。
测试卡上每个点的大小必须为测试卡垂直高度的8 +/-0.5%,并且每个点的周长之间的间距必须是圆点标称直径的 2 +/-0.2 倍。所需的最小点数必须覆盖水平和垂直方向上的整个视场(FOV)。
DUT 和测试卡之间的距离必须设置为使点阵与 FOV 相匹配,并且必须不小于 DUT 的最小焦距。镜头必须聚焦在测得的焦距处。
最后,图像中的每个点必须足够大,以包含至少 200 像素。如果无法做到这一点,例如使用低像素数传感器,则必须报告所包含的像素数。
此外,P2020还给出了新方法 B:
用一个准直(Collimated)光源发射装置(图中左侧像手电筒那个部分)放置在相机前,相机放在一个载台上,载台可以围绕光源转动,模拟各个方向摄入的光线,这样就可以测到各个FOV的flare,或者可以设计成让光源围绕相机转动。
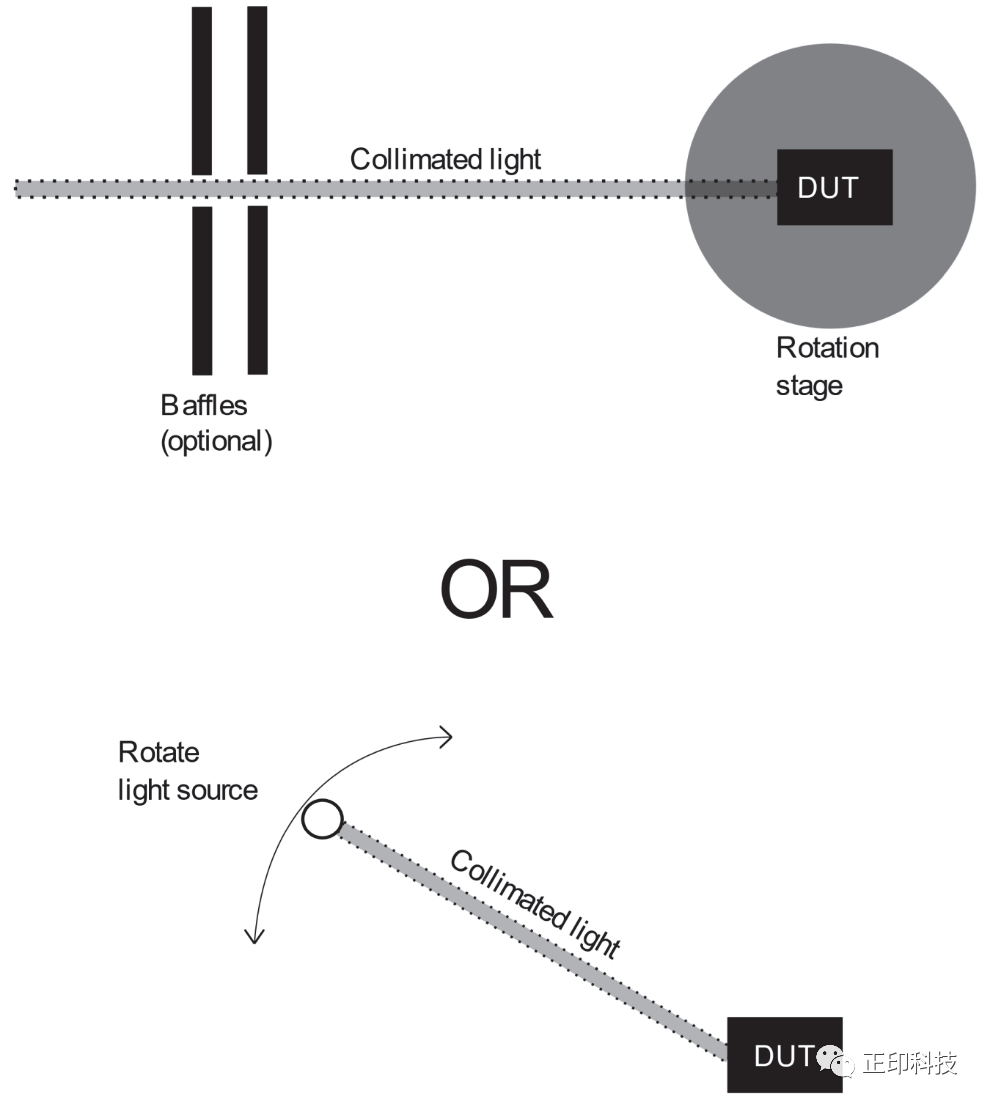
这种设计的计算原理是,根据相机的几何校正模型,计算出准直光源的成像Mask,Mask内的是合理的像,Mask外的就是flare造成的图像。两者信号亮度之比就是Flare的程度。
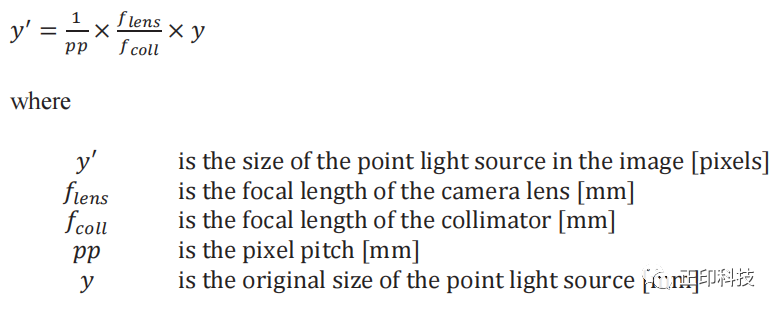
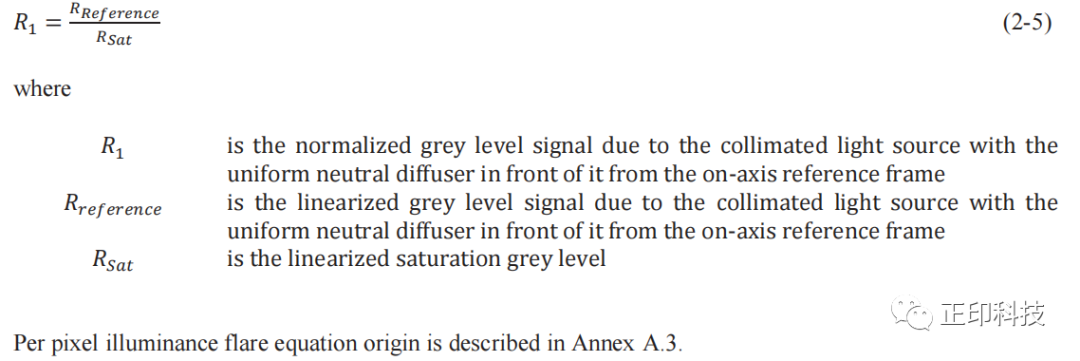
光源成像大小(Mask)的计算公式:
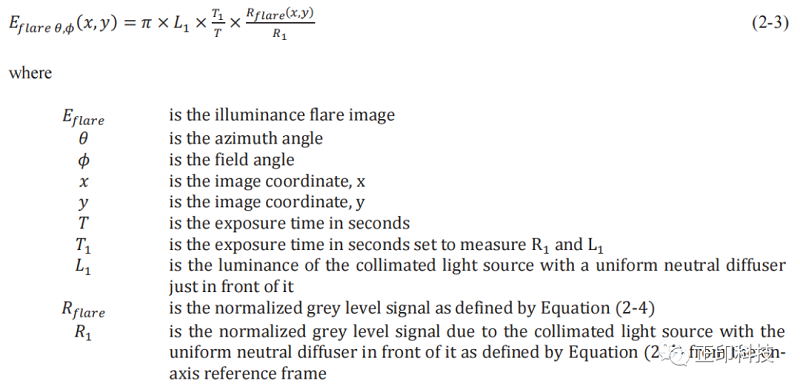
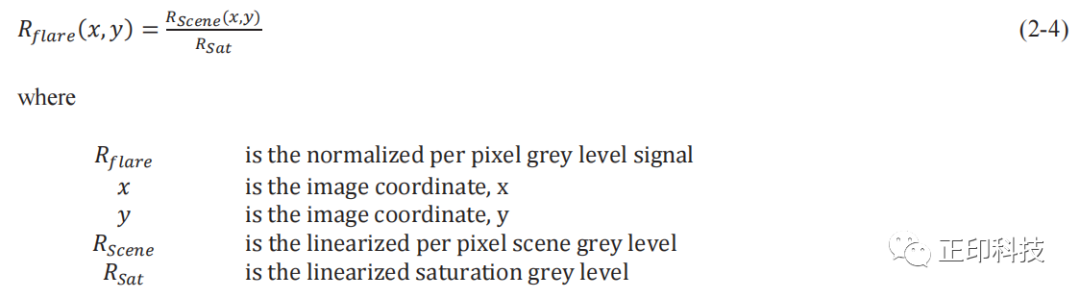
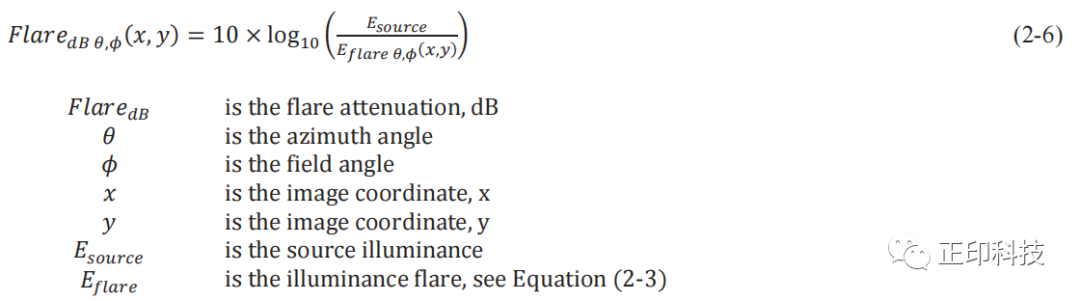
Flare大小的计算公式:
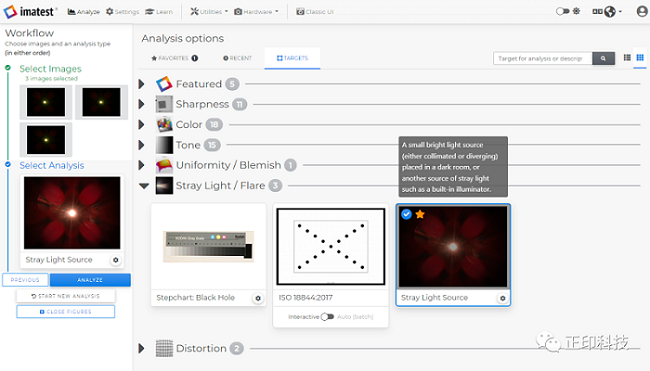
Imatest的测试方案中实物图参考如下:

Imatest 2023新版软件可以同时支持方法A&B:
 |  |
当然,正印科技自研Flare测试系统也可提供旋转摄像头或旋转光源两种方式,并且还增加了导轨可以更大范围自动调节摄像头到光源的距离。

以上就是P2020标准在2022年的草案中提到的Flare参数测试方法介绍。P2020标准的发布为车载摄像头图像质量的评价提供了基准和指导。通过测试不同的图像质量指标,可以对车载摄像头的性能进行客观的评估和比较,有助于提升车辆识别和环境感知的准确性,进一步推动智能驾驶技术的发展。
由于这个标准还没有发布最终版本,参与厂商还存在意见分歧,在未来的版本中还是可能会有一些变化。
但就目前发布的版本而言,还是以imatest推荐的测试方法居多。正印科技是中国图像质量测试领域头部的方案商和服务商,同时更是Imatest在中国的独家战略合作伙伴。除此之外,为了迎接P2020等新标准的到来,正印科技也积极帮助部分国内企业布局Imatest的P2020测试方案,同时还自研开发了更加符合国内企业本土需求,兼容国内标准,如“GB 15084 / QCT 1128”等标准的测试方案,并且还能够与Imatest 分析算法无缝兼容。
我们在北京、深圳、杭州均设有办事处及第三方实验室,欢迎大家点击预约实验室,随时与我们交流~
· END ·
如果您有什么问题或想要了解的讯息,可以在下方评论区留言或直接联系我们:sale@colorspace.com.cn或拨打电话400-886-3881!分享您的看法或提出您的问题!

Was this helpful?
3 / 0
