更新时间:2024年11月6日
01 | 摘要
本文将和大家一起探讨相机动态范围(Dynamic Range, DR)在面对眩光时如何尽可能保持测量的准确性。
相机的动态范围(DR)是指场景中能够以足够对比度和良好信噪比(SNR)重现的光比范围。相机的DR通常受到眩光的限制,眩光是图像中的杂散光,主要由镜头元件之间的反射引起。
杂散光通过使图像泛白、蒙雾,产生伪像鬼影,即在暗部区域丢失细节或产生虚假的信息,从而降低了DR。这是为什么相机(包括镜头)的DR通常比图像传感器的DR更差的主要原因,在最新的HDR(高动态范围)传感器中可以高达150dB(光比接近:3000万:1)。
02 | 引言
在过去两年中,我们发现在测试卡图像中的眩光可能会被误认为是测试卡的图像信息,从而使得动态范围测量值被夸大。通过研究这些图像,我们开发了应对眩光引起的信噪比测量值被夸大的技术,并在此介绍这些技术。
尽管一些客户可能更偏好夸大的测量结果,因为它们显示了非常高的HDR数值,能够带来很好的营销宣传效果。尽管消除眩光后的DR测量数值可能会让客户感到不安,但我们依旧致力于为客户提供更为准确的测量结果。
02 | 眩光的影响
眩光的影响可以通过一张XYLA图卡的图像来说明。XYLA是一种精密的HDR测试卡,采用线性配置增加光密度,由21个灰度块组成,每个灰度块的光密度步长为0.3。如下方实际的图卡展示:
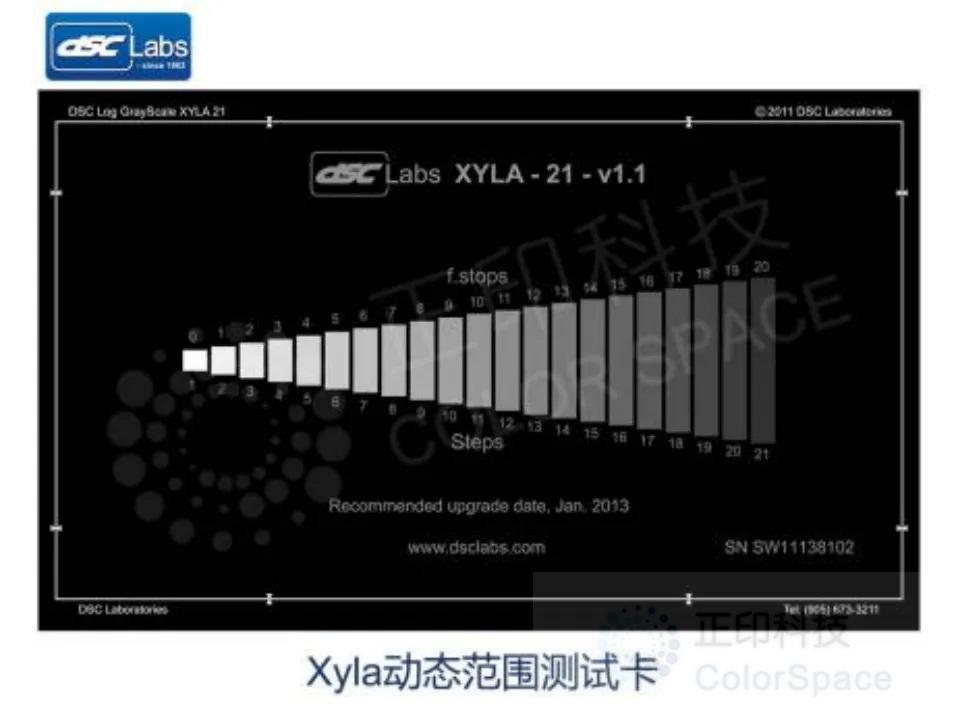
这张图像来自一台低成本的黑匣子相机,基于XYLA图卡的实验测试与数据结果分析:
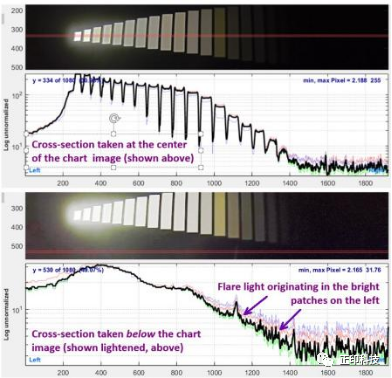
上方的横截面图是通过图像统计模块在XYLA图像中心获取的。眩光在图像中最为明显,并且在横截面图中表现为最亮灰度块左侧的衰减。
下方的横截面图取自中心偏下区域(下方),上方的图像经过提亮处理,以使眩光更加明显。测试卡右侧(x 轴在 800 到 1600 之间)的像素水平变化是由左侧最亮灰度块散射的眩光引起的。

该图像具有非常强的局部色调映射,导致测得的伽马值非常低(0.148),这一数值并不十分具有实际意义。信噪比(SNR)的变化也不寻常,因为它并不像传统线性图像传感器那样单调下降。这表明该图像使用了具有多个工作区的HDR图像传感器。
由于图像存在显著的桶形畸变,区域选择变得困难。相比之下,使用对比度分辨率图卡更为简单,并且在色调映射存在的情况下,它能更好地反映系统的性能。
如果眩光再严重一些,它很容易被误认为是来自测试卡本身的信号,从而导致错误的动态范围测量。
03 | 眩光的复杂性
眩光可能极其复杂。它会在图像中增加一个偏移量(通常称为“面纱眩光”),这很难与图像处理流程中的黑电平偏移区分开来。大多数情况下,眩光在亮块附近最为强烈,随着距离增加而减弱。但这种衰减速率很少呈现良好的指数形式。
镜头反射是中程眩光光线的主要原因。中程眩光(Mid-range Glare)是指在中等距离上(通常在几米到几十米之间)的光源照射时,由于镜头或成像系统的光学特性而在图像中产生的眩光现象。这种眩光通常会导致成像的对比度下降,图像中出现亮斑或光晕,从而干扰视觉清晰度。
在汽车成像系统中,中程眩光常见于摄像头遇到其他车辆的前照灯、路灯、或LED灯等光源时。由于这些光源距离摄像头在中等范围内,光线经过镜头系统后发生反射和散射,导致图像质量受到影响。特别是在夜间驾驶场景中,这种中程眩光会干扰车载摄像头的正常工作,影响高级驾驶辅助系统(ADAS)的性能。

未涂覆的玻璃表面(折射率约为1.5)反射入射光的R = 4% = 0.04(请记住,玻璃片或镜头组件有两个表面)。
在表面与光源之间的每个玻璃表面上,初次反射光的R部分(原始入射光的R²)会反射回图像传感器,这被称为次级反射。由于大多数镜头表面是曲面的,这些光线将是未聚焦的,即它们会模糊图像的一部分。
根据Edmund Optics的说法,最佳的抗反射涂层在可见光谱(约400-700nm)上具有R ≅ 0.4% = 0.004的反射率。对于合理的入射角范围,R = 0.005可能更为现实。每次次级反射反射回传感器的光线的反射率为R² = 0.000025 = 2.5*10-5 = -92 dB(20*log10(R²))。次级反射的数量Nsec随着镜头中组件数量M(即粘接在一起的元素组,每个都有两个空气与玻璃的表面)的增加而快速增长:一个组件时为1;两个组件时为6;三个组件时为15;四个组件时为28;五个组件时为45,依此类推。对于M个组件,

对于高质量手机相机,M = 5个组件是典型配置;而DSLR变焦镜头中,M ≥ 12个组件是常见的情况。总体而言,镜头眩光的严重程度通常低于次级反射数量所暗示的,因为杂散光并不会覆盖整个图像;它在亮区的远离处会减弱。因此,即使传感器的动态范围(DR)远高于此,实际相机的动态范围测量通常也被限制在70-90 dB左右。

由于ISO 18844眩光模型未能测量由镜头反射引起的空间依赖性眩光,因此在表征实际系统性能时其价值有限。

关键要点——眩光光线主要是从图像亮区扩散到暗区的光线。这种扩散光线可能与实际的测试卡信号混淆(尤其是在使用线性测试卡时),从而导致动态范围(DR)测量结果被夸大(过于乐观)。
此外,增加的眩光光线(可能源于较差的、即较低成本的镜头涂层)会通过模糊图像的阴影区域来降低实际动态范围,但却可能导致动态范围测量结果上升。因此,有必要区分测试卡的真实信号与眩光光线中的伪影信号。
04 | 动态范围测试卡
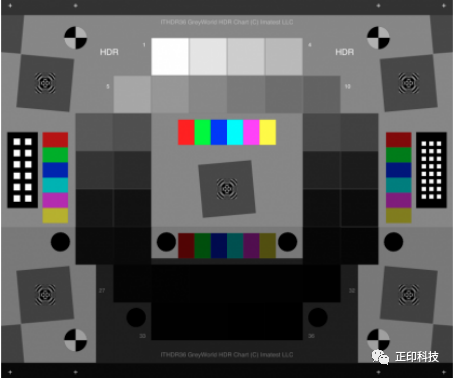
Imatest推荐用于测量动态范围(DR)的测试卡是透射式(即背光)测试卡,其图案配置为近似圆形的色块;即与线性分布的XYLA测试卡不同。上图展示的两层或三层高动态范围测试卡有多个版本可供选择。由于该测试卡的色块密度不具一致性,因此在使用这些测试卡时需要配备参考文件。
05 | 高质量相机与低成本相机比较
直到最近,我们分析的大多数动态范围(DR)图像来自于具有相对较低眩光光线的单反相机或无反光镜相机。而我们看到的眩光光线严重的图像则来自劣质相机。我们尚未确定眩光光线为何会如此严重;这可能与多元素镜头的涂层质量较差或镜头筒内的阻光设计不足有关。以下是高质量相机的结果示例:
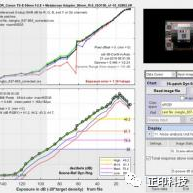 |  |
| 高质量(佳能90mm倾斜/移位)镜头的RAW图像结果 | 高质量(佳能90mm倾斜/移位)镜头的JPEG图像结果 |
 |  |
| 消费级(佳能75-300mm)镜头的RAW图像结果 | 消费级(佳能75-300mm)镜头的JPEG图像结果 |
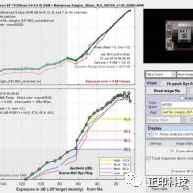
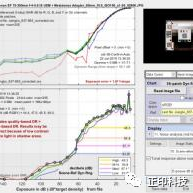
这四幅图像是针对在Sony A7Rii相机上使用两种非常不同的镜头拍摄的48位RAW(或从RAW派生的TIFF)和24位JPEG文件:
- 一款消费级佳能EF 75-300mm f/4-5.6镜头(原版),设置为80mm,f/5.6。这款镜头有15个镜片,分为10组。
- 另一款是高质量的佳能TS-E 90mm f/2.8(倾斜/移位)镜头,设置为f/5.6。由于该镜头有6个镜片,分为5组,因此其眩光光线预计会低于75-300mm镜头。
- 请注意,图中两个最暗的色块(35和36)的结果超出了图表范围,因为它们的密度(8.184和8.747,分别等于163.7和174.5 dB)超出了图表的160 dB限制。160 dB相当于1亿:1的比例,远超相机系统(带镜头)的能力。
如预期,90mm T/S镜头的动态范围(DR)明显更好,JPEG文件在图像的亮部有更多的响应“肩部”(即亮部区域的斜率降低)。但有一个意外发现:JPEG图像的动态范围与RAW图像相当,这显然是因为伽马编码在亮部减少像素级别而在暗部增加像素级别,使得动态范围超出线性8位(256级)文件的预期。
请注意,在上述四幅图像中的三幅中,低质量镜头的动态范围低于基于斜率计算的动态范围;而在剩余的一幅图像中,两者非常接近。我们不建议单独使用基于斜率的动态范围(因为它通常延伸到信噪比为0 dB(信号/噪声=1)的区域之外;即包括信噪比较差导致噪声完全掩盖图像细节的区域)。
06 | 低成本“黑匣子”相机DR结果
当与我们最近收到的一幅低成本“黑匣子”相机的图像相比时,两个镜头(中高质量)的动态范围差异似乎微不足道。
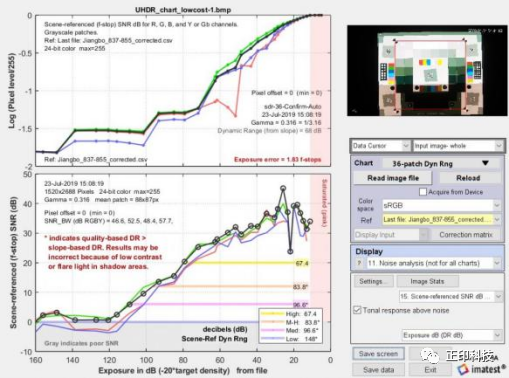
低质量相机(信噪比为0 dB,标记为Low ——)的动态范围(DR)测量为148 dB,这是一个令人惊讶的高值;而基于斜率的动态范围为66 dB,远低于多个质量基础的动态范围测量(也低于90mm T/S镜头的基于斜率的动态范围)。请注意,两个最暗的色块在此图中未出现,因为它们的密度(8.184和8.747)超出了160 dB的限制。(160 dB的范围是1亿比1——超过任何传感器或相机的预期。换句话说,如果一个光子到达最暗的色块,最亮的色块将会让测试卡或传感器过曝或损坏)。
要理解发生了什么,我们需要观察高质量相机图像中的暗部,这些暗部被额外(X-)或XX轻微亮化以使暗色块中的细节可见,并将其与低成本相机中相应区域进行比较。

六元素(5组)的90mm镜头的RAW图像在第7行(倒数第二行;色块27-32)显示出亮度逐渐降低的明显区域,而在底部行中仍显示出明显的区域,尽管亮度不再降低。色块30中可见反射(可能来自镜头)。90mm镜头的JPEG图像噪声更大。有些可能是量化噪声,因为JPEG文件仅有256个级别(0-255)。来自15元素(10组)的75-300mm镜头的图像明显显示出更多的眩光证据。
现在,将这些结果进行比较——特别是90mm T/S镜头的RAW图像——与低成本黑匣子相机的图像进行比较。

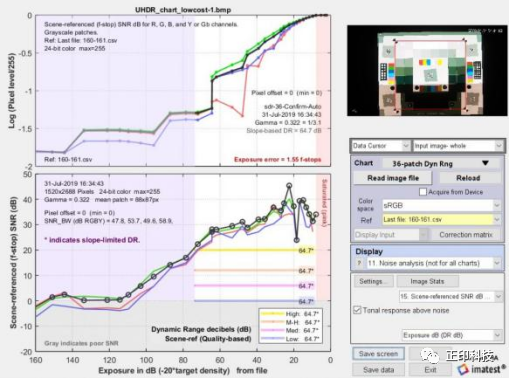
在底部两行(色块27-36)中,没有色块细节可见。在每行中,亮度不是从左到右逐渐降低,而是从上到下降低,底部两行的亮度保持相对恒定,明显可见条带(这是255个级别的结果)。这显然是眩光光线,而不是来自测试卡的信号。
不幸的是,这些行的信噪比相当不错,因为Imatest在噪声计算中消除了照明不均匀性的影响。(可以关闭该设置,但我们通常建议保持开启,以在实际照明不均匀性存在的情况下获得更好的结果)。但这个信号是伪影,而不是真实信号。
这使我们得出不可避免的结论:低成本黑匣子相机的质量基础动态范围(DR)结果是不正确的,我们需要检测眩光光线压倒测试卡图像信号的色块,并将它们排除在DR计算之外。
好在,对于像上文所示的36阶动态范围测试卡而言,这并不难(但对线性测试卡则较难)。由于色块的布局,当眩光光线主导场景时,灰阶色块亮度不再降低。这在上例底部两行中清晰可见,这些行中的图像从上到下变暗——与灰阶卡顺序垂直。
当灰阶色块亮度不再降低时,我们可以确定是眩光光线主导;也就是说,已经超出了相机的动态范围。此现象适用于超出基于斜率的动态范围的色块。因此,将所有质量基础的动态范围测量限制在基于斜率的动态范围(最大值)之内是合理的。

在Imatest 5.2中,选项II窗口(可通过Imatest主窗口右下角的按钮访问)提供了一个选择,是否将质量基础的动态范围限制为基于斜率的动态范围。当勾选该框时,结果显示中会出现该限制。
关键要点——眩光光线在我们过去测试的高质量单反和无反光镜镜头中并不是问题,但它已成为影响低成本镜头(特别是用于汽车或安全行业)性能的主要因素。我们见证了眩光光线如何在降低实际相机动态范围的同时改善传统的动态范围测量结果。
我们解决这一问题的方法是将质量基础的动态范围测量(信噪比SNR ≥ 20 dB表示高质量,SNR ≥ 0 dB表示低质量的密度范围)限制为基于斜率的动态范围。这是有效的,因为对于超出基于斜率限制的色块(在对数像素级别与对数曝光的斜率低于最大斜率的0.075时):
- 对比度太低,图像特征无法清晰可见。
- 信号被眩光光线主导,掩盖了来自测试卡的真实信号;即,这个“信号”是伪影,而不是真正的信号。
以这种方式限制质量基础的动态范围显著提高了测量的准确性,更重要的是,可以帮助防止劣质低质量镜头被接受用于汽车安全或安全性至关重要的应用。
07 | 展望
在现代相机技术不断进步的背景下,确保动态范围测量的准确性显得尤为重要。客户们在选择相机和相关设备时,往往关注动态范围的表现,因为这直接影响到他们的拍摄效果和后期处理能力。通过深入理解眩光的影响及其在不同相机系统中的表现,行业从业者能够更有效地评估和提升相机性能,从而为客户提供更具竞争力的产品。
我们强调,虽然一些客户可能更倾向于追求夸大的动态范围测量值,但我们致力于提供真实、可靠的测量结果,以便客户能够做出明智的选择。未来,持续关注眩光对动态范围测量的影响,将不仅推动相机技术的改进,还将为客户创造更高的价值,最终提升他们的使用体验。因此,在追求技术创新的同时,理解客户需求和实际应用场景,将为行业的可持续发展奠定坚实基础。
联系我们:
如果你也对眩光或动态范围测量感兴趣,可以在下方评论区留言或直接联系我们:sales@colorspace.com.cn或拨打电话400-886-3881!分享您的看法或提出您的问题!

Was this helpful?
3 / 0
