第一个优点是能够将信息投射给驾驶员,并通过改进驾驶员与道路上车辆之间的交互提高安全性。
第二个优点是当驾驶员在一天中的任何时候驾驶汽车时,能够确保在各种环境条件下始终正确呈现所有相关的信息。
第三个优点是使驾驶员能够在查看相关信息的同时保持专注于道路状况,而传统上,无论是速度表还是主要来自车辆中控台的信息,驾驶员都必须将目光从道路上移开才能看到这些信息。
未来将可能出现多种抬头显示技术。当查看挡风玻璃上的信息时,这些技术可以为驾驶员提供更具无缝性的不同视觉体验。目前常见的抬头显示在固定距离下以二维固定方向呈现信息。当您仅查看一组有限的信息时,这种常规设备很不错。
 在固定投影距离下呈现二维虚拟图像的抬头显示(HUD)
在固定投影距离下呈现二维虚拟图像的抬头显示(HUD)

在抬头显示视场中增添更多信息,但不增加投影的维度或深度,这可能会产生被信息淹没的视觉体验
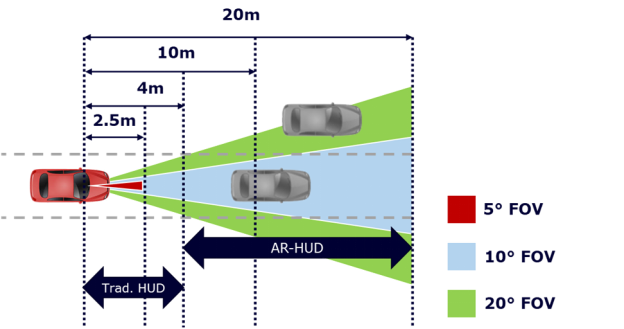
常规 HUD投影距离与增强现实 HUD(AR-HUD)投影距离之比较

来自丰田的增强现实 HUD概念,其将可变距离投影与 3D虚拟图像相结合
他们还必须改变视线方向或视角,以确保能够在视觉上整合车辆外部的其他信息。当他们将视线从抬头显示屏幕转向周边环境时,这将会限制他们的反应时间。

图示:与固定距离HUD投影相关的挑战,其中,驾驶员必须将视觉焦点从HUD转移到外部环境。
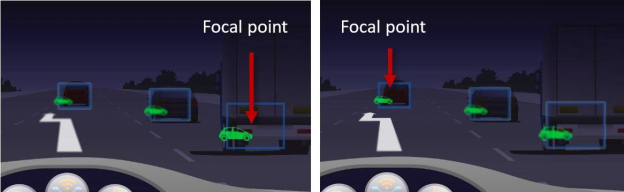
图示:AR-HUD的优点,其中,虚拟图像在相对于外部物体的距离下被投射,从而使驾驶员能够同时关注外部物体和投影。
举例来说,使用基于激光的技术创建3D或AR投影特别困难,因为激光使用单一光束源来产生图像,当为抬头显示创建2D固定增强解决方案时,图像效果最佳。也就是说,将激光用于更先进的3D或增强现实应用的概念正在广泛地酝酿中。DLP投影技术或TFT显示器如今已广泛用于生产中,并且通常在2D和3D平面上用于常规型和增强现实型抬头显示。每种抬头显示都有其优点和缺点,并存在独特的测量挑战,以确保视觉性能。
常规抬头显示在2至4米的固定距离下投射信息,并且到目前为止,这些信息大多数都是在2D方向下投射的,没有3D深度。但是,我们已经开始看到市场在针对这些新方面对常规抬头显示作出调整。
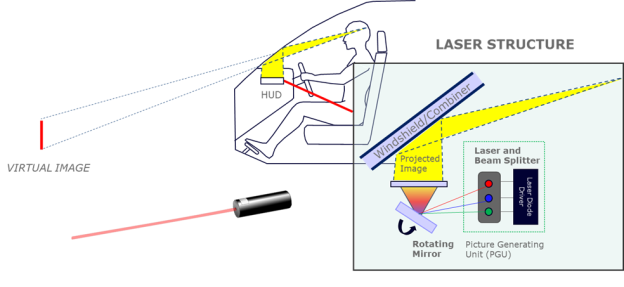
图示:基于激光的 HUD系统示例
然而,这种HUD也存在挑战。由于激光技术使用单个光束源来产生图像,当光线被导向至挡风玻璃上时,相比其他类型的HUD,光线折射会导致相对较低的清晰度。这可能会导致图像模糊、清晰度低且分辨率降低。重影是这种HUD技术存在的另一个问题。虽然重影是所有类型的HUD都会遇到的问题,但基于激光的HUD技术目前尤为如此。
激光技术特有的另一项挑战在于散斑。这是指当激光光源从表面漫反射时产生的颗粒状图案。就像镜子一样,随着视角的变化,视觉干扰很明显,并且散斑图案也会发生变化。 为此,我们需要确保所呈现信息的一致性。我们可以使用成像解决方案来测试和查看散斑分布的亮度均匀性,以感知HUD投射不同分辨率的图像时在视觉上的可接受性。
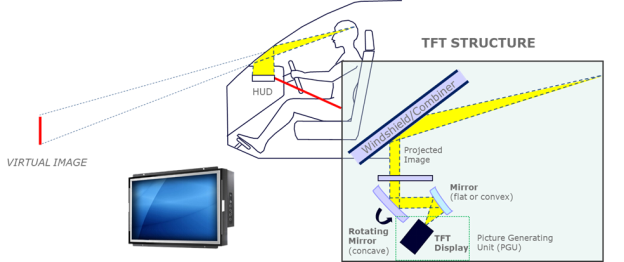
图示:基于TFT的HUD系统示例
TFT显示技术已广为人知,并且现已出台了多项关于其性能和使用寿命方面的监管法规。当在汽车领域中引入新技术时,这始终是一项需要克服的挑战。生命周期始终至关重要,并且车辆中安装的任何显示器都需要提供7到10年的生命周期。
TFT技术的优点在于,事实已经证明,其能够满足这种生命周期要求。TFT技术的另一大优点在于可靠的色彩分布。由于在生产过程中可以轻松调整和校准显示器,因此您可以确保在HUD投影中以准确、明亮且美观的方式呈现信息。
我们所看到的TFT显示器的主要局限性在于亮度输出。最终,最直接的缺点在于创建足够明亮的图像来应对HUD图像投射所涉及的各种环境光条件。为了超过或增加设备的亮度分布和输出,我们必须向设备驱动大量功率。驱动更大功率所面临的问题在于,我们最终可能会导致色度精度偏离所预期的分布。

示例:由于 TFT HUD的亮度输出增加而导致的色偏
另一个局限性在于,在有些情况下,根据所使用的TFT的尺寸或合成单元的分布法则,我们最终实现的视场可能会很有限。这是由于显示器本身的局限性导致的,并非每种TFT HUD的情况都如此。
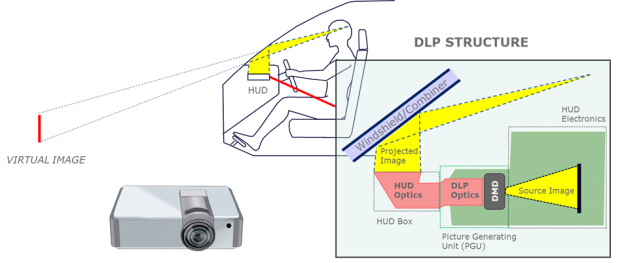

图示:基于 DLP的 HUD系统示例
我们目前在市场上看到的DLP芯片组类似于基于电影的投影技术,这意味着我们拥有足够的经验来了解它们的亮度输出能力。我们知道,它们具有提供饱和色彩的优点,并且在我们所讨论的三种技术中可提供最佳的对比度。用于HUD的DLP投影技术依赖于DMD。DMD是一种可实现空间光调制的光学微机电系统。每个DMD包含多达800万个构建在相关CMOS存储单元顶端的独立控制微镜。如果使用DMD反射镜阵列对图像进行不当的映射,将会导致图像的对比区域之间发生调制。这表现为当对比区域较为靠近时,我们可能会在投影中看到空间频率、噪声或模糊性,从而降低了可见分辨率和对比度。
我们看到DLP技术的最大局限性在于DMD芯片组与阵列本身和投影平台之间的错位。这种错位会导致清晰度和分辨率下降、重影、严重失真等异常。

示例:因投影和挡风玻璃几何形状中的元素错位而导致的 HUD重影
所有HUD技术都有基本的测量要求。每台HUD都需要满足亮度、色度、均匀度和对比度公差要求,并检测是否存在像素缺陷或线缺陷、调制传递函数(MTF)、重影失真、变形和视窗限制。然而,我们所介绍的每种技术的关注点或测量要求可能略有不同。举例来说,对于存在可变性和极端景深的增强现实HUD而言,失真、重影、MTF和视窗限制等因素可能会产生较大的影响。
HUD测量场景之间的主要差异与满足不断增加的或可变的图像距离、分辨率和视场的新需求有关。就常规HUD而言,我们知道它们的投影深度有限,最多达到4米。这些图像不会改变相对于外部环境的距离或位置,并且对于需要更新的信息而言是静态的。
另一方面,增强现实系统具有响应能力,它们可与车辆外部的某些元素进行交互。所呈现的信息是不断变化的,并且这些信息是在大得多的视场范围内变化的。在测量方面,确保足够的分辨率并能够表征不同工作距离和更大景深下的信息非常重要。我们可以通过一些示例非常快速地了解常规HUD和增强现实HUD的不同测量要求。
Was this helpful?
0 / 0
