犹如单反相机需要解决很多问题才能在特定的场景下用好,TOF相机作为专业的测距仪器,也需要掌握很多技巧才能充分发挥其能力,能解决下面几个问题才算是勉强入门。

近年来,三维视觉成像越来越多的应用于医学仿真,无人驾驶和目标跟踪等领域。激光雷达因为具有高精度、测距范围远的优势,在无人驾驶技术出现之后,更是直接驱动一批公司进行各种各样的激光雷达研发和生产。然而目前普遍存在激光雷达技术落地成本高昂,反馈帧率较低的问题,导致部分应用都还处于实验室阶段。室内移动机器人由于运行速度和所处场景与室外无人驾驶汽车不同,通常需要较高帧率和更高分辨率的激光雷达。因为多线激光雷达的成本原因,目前大多数室内移动机器人采用单线激光雷达用于定位、导航、避障等等,但是由于天然的缺陷,单线激光雷达无法构建完备的深度场景。
因此,另一种直接进行深度成像的相机,包括双目、结构光、光飞行时间等等成了更多项目的硬需求。
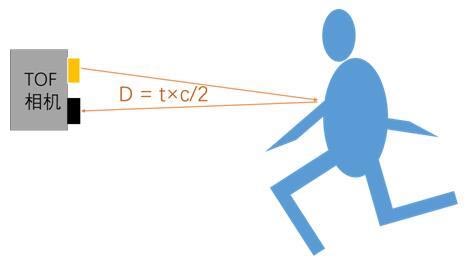
光飞行时间法(TOF)深度相机是通过测量光从发出到经过物体反射回相机的时间来测量物体到相机的间距。TOF相机采用最直接的测量手段进行深度成像,以最小的计算资源获得较佳的深度信息,以较高的帧率实现深度场景的构建。TOF深度相机按照其基本原理,和激光雷达一样,也可分为脉冲TOF(P_TOF)和连续波调制TOF(CVM_TOF)。P_TOF发射光脉冲(一般为不可见光)到被观测物体上,然后接收从物体反射回来的光脉冲,通过探测光脉冲的飞行(往返)时间来计算被测物体离相机的距离;CVM_TOF发出的是一束调制的连续光,通过测量光返回和传输的相位差反推光飞行时间进行测距的。倘若想获得准确的深度测量数据至少需要解决以下几个问题。
一、相机精度不够,真的只是厂家的原因吗?
最简单的办法是增加积分时间或进行多次测量,再不行就加滤波。
我们说的精度其实通常是指单点波动,1-σ,TOF相机作为一种光电测量工具其精度免不了受AD转化、信噪比、系统噪声等影响。下面这张图描述了测量精度与信号强度的关系。

TOF测距需要把光电模拟信号转换成数字信号进行处理,ADC过程中,模拟信号相当于在最小分辨力上进行了取整处理,这个过程必然会引入一部分噪声。1.1V的模拟信号可能只能识别成1V的信号,误差10%,模拟量10.1V的信号经过AD之后可能只能识别成10V的信号,误差1%,100.1V的信号识别成100V,误差1‰。所以AD转化过程在信号强度比较低的时候尤其会引入噪声和误差。另外,TOF相机的信噪比SNR通常与积分时间t的关系为SNR∝1/ √t,所以增加积分时间,提高信号强度或许是一个有效的解决办法。
而对于系统引入的噪声,也不是没有一点办法,可以从电源供电优化等角度降低,但优化的空间较小。简单来说,信号强度越大测距精度越高(当然过曝除外),那么想要获得较高的测距精度,首先就从信号强度下手。
同样的道理,系统的噪声在多次测量过程中会被平均掉,同样也会对提高相机的测距精度有帮助。
二、测量准度不够,什么原因?
可以自己标定哈。
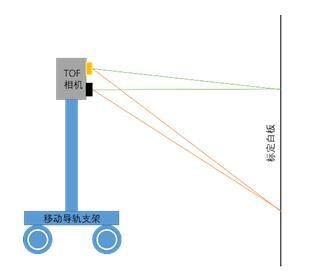
对于传感器如果测量值与实际值之间存在固定的偏差时,通常的做法就是重新标定,在测量值和实际值之间建立映射关系。对TOF相机而言可以把相机固定在导轨上,对着一堵白墙测距,把每一个像素点的测量值和白墙成像区域与相机之间的距离建立起对应关系,再根据这种对应关系,在测量值上进行修正就可以获得较为准确的距离值。
如果这还不能解决,看看相机安装是否有问题。
TOF相机是一种主动测距方式,测量的准度受很多因素干扰,其中安装不合适的话有可能会引入多路径等问题,导致测距准度失真。
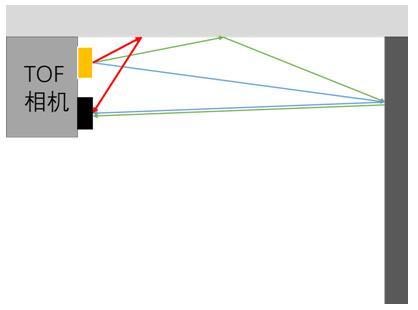
尤其是当相机安装在高反射率物体旁边测量低反射率目标物体时会表现的尤为突出。本来可能理想情况是按照蓝色路径进行测距,但是墙面反射的光也会传播到目标物体上再经过反射回到相机(绿色光路),甚至相机的照明光将旁边的高反射率物体照亮直接进入相机(红色路径),由于光学系统的不完美,形成眩光,干扰测距。
三、对运动物体检测效果不好,怎么办?
提高帧率。
测量高速运动的物体当然就得用高速相机了,但是通常的TOF相机的全像素送图模式下的帧率不能达到很高,一般45FPS以下,这时候还有一个办法提高帧率——减小数据量,减小数据传输和AD转化的时间,提高帧率,可以只将感兴趣的区域送出,也可以对原始的图像进行像素模拟信号合并或者降采样。
四、太阳光干扰就真的没办法解决了吗?
减小阳光干扰或者增加光信号强度。
太阳光干扰的情况下,最直接的就想办法减小太阳光的强度。一方面加镜头遮光罩,避免太阳光直接入射到镜头产生眩光,影响测距。另一方面减小积分时间同时增加光功率,许多TOF相机外置曝光触发,这时候可以将这些曝光触发接口利用起来,配上功率较大的照明系统就能很好的解决。另外,因为太阳光的光谱很宽,而实际TOF使用的照明系统的光源通常是LED或者LD,他们的光谱宽度通常都不宽,LED一般50nm,而LD只有10nm以内,因此如果厂家提供的镜头没有加滤光片,用户可以自己根据需要加一个滤光片以过滤太阳光中绝大部分干扰光。
五、量程不够怎么办?
HDR,高动态范围测量,长短时间曝光的数据进行融合。
短积分时间测量较近的区域,长积分时间测量较远的区域,在整合较远和较近的测量空间,就可以既对近处的物体测距也可以对远处的物体进行测量。
看完了这些你觉得你会TOF相机了吗?其实很多时候我们说TOF各种各样的问题,实际上是使用的方法不完全正确罢了。好比单反,按快门很简单,但是加不加滤镜,光圈和曝光选择,焦距调节,构图等等学问多着呢。TOF相机,作为一种专业的成像仪器,其性能能否充分发挥很大程度上取决于用户的操作技能。看完了赶紧去试试吧。
Was this helpful?
10 / 0
