Imatest 5.0的新功能中,其中有一项是支持一款新的HDR测试卡,叫做Contrast Resolution Chart. 它是为对比度的可视化和测试而设计的(在较大的亮度范围内的低对比度物体的可见度)。这张测试卡对对于汽车和安防行业的宽动态范围测试应用很有帮助。Imatest在IEEE P2020汽车影像标准会议上推荐了这张测试卡和测试方法。
2. 背景
摄像头的动态范围(摄像头具有良好的对比度和信噪比的色调范围)是传感器和镜头的重要性能(在一定程度上也是图像信号处理性能)。现代的高动态范围(HDR)传感器拥有令人印象深刻的动态范围120dB(1000000:1亮度比)或更高,但是当镜头放在传感器前面,杂散光(在镜头结构内反射的杂散光)限制了系统(相机)的动态范围,降为100dB以下。
Flare light(耀斑) 可以通过测试在白场背景上的小面积纯黑区域(黑洞或光阱)进行分析,Imatest很早以前支持一种方法,可以通过灰阶卡来分析Veiling glare(受Flare影响的参数)。
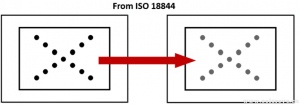
Veiling glare是对成像系统的耀斑的一种相关性测试,条件是在图像上的杂散光到处都有,然后测量黑色区域来分析。下图中黑色区域为吸光材料制成的光阱,由于Flare的存在,会拍摄出右边的图像,黑点变亮,像起雾一样。
3. 耀斑/眩光的测量存在以下问题:
(1)不能对暗区的图像低对比度特征的能见度直接相关
(2)他们往往夸大了耀斑的负面作用(例如,一个120dB的HDR传感器的相机可能会得到动态范围的测试结果只有50dB)
标准的动态范围测量方法通常使用密度范围大于摄像机动态范围的透射灰度阶卡进行测试。虽然它们显示了总体的密度响应,但对于Tone Mapped Image(色调映射图像)却不能很好的分析,而这种图像算法广泛用于处理人类观看的HDR图像。色调映射算法选择性地调整图像中的色调,在有限的动态范围内,提亮暗区以使它们可见。下图中右侧的图像是在左侧图像基础上,使用Matlab的Tone Mapping默认算法得到的图像。
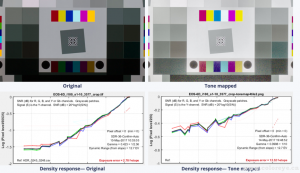
从上图中的分析结果(曝光与像素级的关系)上看,经过色调映射算法处理后,灰阶间的过渡连续性变差了,色块中的中低对比度图像信息的可见性发生了错误的展现。色调映射通常会破坏传统灰阶测试图的色调响应测量。
为此我们开发对比度分辨率测试图的目的,是为了克服耀斑/眩光测试和传统的灰阶动态范围测试的缺点。
4. 对比度分辨率测试图的概念图像
以下是一个对比度分辨率测试图的概念图像(与实际图表不同,它的色调范围太大,无法在网页上复制)
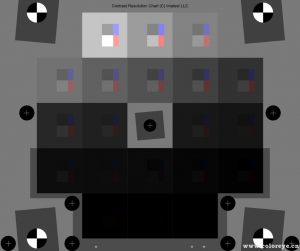
对比度分辨率图是由两层8×10英寸胶片制成。该图卡包含20个灰阶,密度从OD=基材密度+ 0.15,至基材密度+ 4.90,每一级相当于OD=0.25,如果计算从最亮到最暗的色块,总密度范围是5.05 OD = 101dB)。大的灰阶块被用于噪点测试,因为小的色块,对于噪点分析来说太小了。
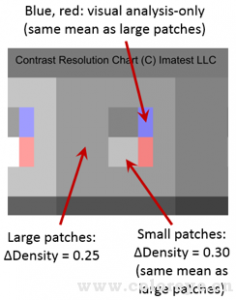
每个大正方形里面(见上图)有四个小块:浅灰色和深灰色,红色和蓝色。两个灰色块的密度分别比背景低于和高于0.15。差值为0.30 OD(6dB),相当于2:1的对比度。浅灰和深灰色块的平均密度与周围背景的密度相同,以尽量减少对色调映射的影响(同样适用于蓝色/红色色块)。浅灰和深灰的浅色块用于详细的定量分析,蓝色/红色的色块仅用于视觉评估)。
需要注意的是,许多最近的HDR图像传感器声称动态范围为120dB到150dB)。这可能只是传感器的情况,但真正的光学成像系统,真实摄像机的动态范围很多是达不到的。实际很多相机实测值最多达到100dB;杂散光严重的情况,还会更差。
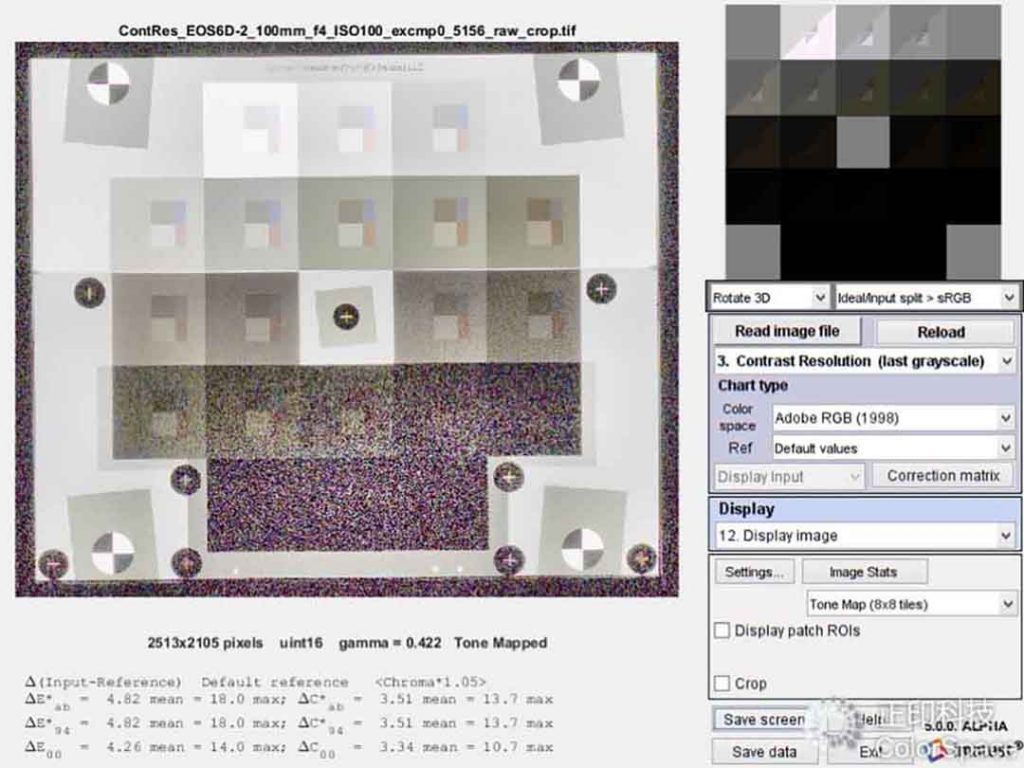
下图是由佳能Eos-6d拍摄的图像(全画幅单反相机配置一个高质量的100毫米微距镜头,设置到ISO 100拍摄),RAW文件记录,转换为DNG文件(因为dcraw可能无法删除佳能CR2文件中的黑电平偏移量),转换为48位Adobe RGB的TIFF文件进行分析(没有锐化或降噪),然后裁剪。下面的图片是一个8位JPEG,来自非常大的48位TIFF文件。
以下是在Imatest 5.0软件中对这张拍摄图片的分析过程:20个大的区域中,每个区域内都选择了5个小区域进行分析。大的长方形区域用于分析噪点统计,其中的两小方块用于减除由于杂散光造成垂直不均匀,对比分析浅灰和深灰色块。查看以下3个分析结果:
7. B&W density & White Balance
11. Noise analysis
12. Display image
5. 分析结果和可视化分析
以下阶调响应和信噪比(SNR)分析结果

相对较直的(细线)红、绿、蓝和Gray(y通道)曲线是从大的灰色块分析组得到的。它们对应于标准的动态范围灰阶的分析结果。这些曲线上的尖峰(不是很突出)是来源于大灰色色块中的浅灰色和深灰色色块。品红曲线包含显著的结果,则由内部的灰块计算得到。
在上边的图(阶调响应)中,品红粗线代表浅灰和深灰色块的信号差。这很好的表示了这些灰块的可见性。品红细线是信号差与正常信号(大的灰块的信号)的归一化结果。归一化的差值基本上保持常数,直到第16个色块开始下降比较大。
在下方的(SNR)信噪比结果图中,品红粗线是从深、浅灰块计算而来的信噪比差值。这可能是最重要的一个分析结果了。
我们仔细观察图像,在正常校正的显示器上,正常的观察条件下,最暗的区域是不可见的。
6. 可见性分析
对比度分辨率测试卡的关键属性是,它能够在较大的亮度范围中清晰地显示低对比度对象的可见性。使用阶调灰阶的标准灰度测试卡很难做到这一点。
通过对比Tone Map算法前后的图像结果,可以视觉上看到低对比度信息的变化。
色调映射(右图所示)不能产生可靠的定量结果,这是由噪声和最小像素水平的影响,但仍然很有价值,因为因为汽车摄像头设计的视觉输出(摄像监控系统)几乎肯定使用色调映射的(虽然可能有更复杂的程序)。色调映射提亮黑暗的灰阶,使其内部特征可以可视化。
Was this helpful?
4 / 0