动态范围(DR)是曝光范围,即场景亮度,相机在该范围内以良好的对比度和良好的信噪比(SNR)做出响应。

|
动态范围测量技巧
|
传感器与系统动态范围
传感器制造商正在开发高动态范围(HDR)图像传感器,声称具有出色的动态范围:120dB至150dB。被测系统(相机)动态范围通常远低于指定的传感器动态范围。
主要原因是镜头中的杂散光 – 在镜头元件之间和镜筒(在镜头内部)反射的杂散光使图像“起雾”,有时会导致“鬼影”图像。高质量的镜片镀膜有帮助,但仅此而已。不同的测试图表设计具有不同的密度分布,因此图表图像上的镜头光晕数量不同,从而导致测量动态范围的差异。这就是为什么标准化很重要。我们所知道的摄像系统(光线必须通过光学器件)都没有达到120 dB。(100dB大约是我们听说过的最好的(2017年夏季)。
杂散光、测试图设计、曝光和动态范围测量
由于这三个因素(尤其是杂散光),测试图卡的标准化非常重要。(如果没有杂散光,所有测试图表都将具有相似的DR测量值。可能需要指定多个标准图表:一个具有灰色背景(应适用于自动曝光),另一个具有深色背景或较小的明亮斑块。 |
对于线性(非HDR)传感器,可以使用Color/Tone 交互或 Color/Tone 自动模块分析(以前称为Multi chart和multi test)中描述的技术,从绝对原始图像(无去马赛克或任何类型的处理)测量传感器动态范围(传感器饱和度和SNR = 1(0 dB)之间的亮度范围)。它也可以使用一系列平场曝光(通常涉及校准的中性密度滤光片)进行测量,如EMVA 1288标准中所述。这些测量不应与相机或系统测量(特别是对于HDR系统)混淆,因为用于测量的图像具有零动态范围,因此与真实相机中的场景不对应。
ISO 15739:对应于场景参考信噪比SNR scene = 1(0dB)的动态范围对应于ISO噪声测量标准第6.3节中ISO 15739动态范围定义的意图:ISO 15739:摄影-电子静止图像成像-噪声测量。Imatest 动态范围在几个细节上与 ISO 15739 有所不同(尽管我们确实测量了 ISO 15739 动态范围);因此,结果并不相同。Imatest 产生更准确的结果,因为它直接从透射图测量 DR,而不是外推最大密度 = 2.0 的反射图的结果。
| 测量 | 模块 | 描述 |
| 单个透射式图表图像的动态范围。 | Stepchart, Color/Tone Interactive & Auto | 需要透射式图表,例如 Imatest 36 色块动态范围或 HDR 图表,因为反射图表没有足够的色调范围。 |
| 多个(不同曝光)图像的动态范围 | 动态范围(后置处理器)模块 | 使用来自多个不同曝光图像的多重测试或步骤图的 CSV 输出。通常与反射图表一起使用,但也可以使用透射图表。不再推荐,因为,特别是对于HDR情况,因为耀斑光对单个反射图像的影响非常小。 |
| ISO 15739 密度为 2 的贴片动态范围 ≈ | Color/Tone Interactive & Auto, eSFR ISO |
密度为 2 的单个面≈外推动态范围。 |
| 原始传感器动态范围 | Color/Tone Interactive & Auto | 将原始数据拟合到 EMVA 1288 标准中的方程,然后外推以求出 DR。测试图表不必具有像 DR 那样大的色调范围,但建议使用色调范围≥ 3 的透射图表。仅适用于线性(非 HDR)传感器。 |
| 对比度分辨率 | Color/Tone Interactive & Auto | 测量低对比度特征在宽色调范围内的可见性。比传统测量更好地指示真正的可用灾难恢复。还不是行业标准(截至 2017 年 9 月),但我们正在努力。 |
| 模块 | 简要说明和建议 | |
| Color/Tone交互(多图表) | 用于测量彩色和灰度图表的交互式模块。当您需要仔细检查结果时,最好。 | 支持步进图中未包含的多种测量,包括 ISO 噪声、传感器动态范围和对比度分辨率。颜色/色调交互和自动共享大多数INI文件设置。它们包括所有步骤图功能。 |
| Color/Tone自动(多重测试) | 用于测量彩色和灰度图表的固定(可批量)模块。与颜色/色调交互相同的功能和 INI 文件设置。在很大程度上取代了Colorcheck和Stepchart(功能有限的旧模块)。 | |
| Stepchart | 用于测量灰度步进图的旧版(旧版)模块(以柯达 Q13/Q14 图表命名)。 | |
| 基于质量 (信噪比) 在大多数情况下推荐。 |
暴露范围
信噪比在最黑暗的地区往往最差。 |
信噪比 scene ≥ 10 = 20dB; 高品质 信噪比 scene ≥ 4 = 12dB medium-high quality 信噪比 scene ≥ 2 = 6dB; 中等质量 信噪比 scene ≥ 1 = 0dB; 低质量 |
|
基于坡度 (不建议单独使用,但在 Imatest 5.2+ 中使用以限制基于质量的灾难恢复) |
密度曲线斜率大于最大斜率的7.5%(在暗面)和小于饱和度水平的98%(在亮面)的曝光范围。 必须小心测量,因为原始数据中的噪声和不规则密度步长会影响色块水平,从而影响斜率测量。测试图表密度值为具有 101 个均匀间隔的点,然后使用 Matlab interp1 函数找到这些点的对数像素级别。使用7点宽的矩形核(大约是总范围的1/14)对曲线进行平滑处理。此算法提供比早期(4.4 之前)补丁范围和检测到的 DR 测量更好的结果。 基于斜率的动态范围 不建议这样做,因为在范围的黑暗部分,SNR 可能非常低(通常远低于 1 = 0 dB),导致测量不一致以及测量过于乐观,因为当 SNR < 1 时,图像毫无意义(都是噪声)。基于斜率的DR可能会通过色调映射和中距耀斑(光图斑块渗出,在下面的图像统计图像中可见)错误地增加。 对比度分辨率图表和分析提供了真实相机(系统)DR的更好指示。 |
|
透射式阶梯图
测量相机(或扫描仪)动态范围的最直接方法是使用由灯箱从后面照亮的透射式步进图(注意尽量减少到达图表前面的光线)。柯达/蒂芬 Q-13 或 Q-14 等反射步进图是不够的,因为它们的密度范围约为 1.9 * 3.32 = 6.3 光圈 (38 dB),远低于数码相机(尽管它们可用于从多重测试和步进图的动态范围后处理器中组合的几种不同曝光中获得近似的 DR 测量值: 不建议使用此方法,因为它忽略了耀斑光)。
下表列出了几个传输步进图,所有这些图的密度范围都至少为 3(10 挡光圈)。一些图表是线性的(一行补丁),因此可能会出现渐晕(光线衰减)。除Imatest图表外,所有图表都有深色背景,这使得在自动曝光系统中很难获得正确的曝光。
| 产品 | 步骤 | 目标密度或密度增量:请注意 密度 = 对数(入射 10 光/透射光)。 |
最大功率 | 大小 |
| 分析36色块动态范围图表时应始终使用参考文件(下图) 因为目标密度(照相胶片制造过程的输入) 无法完全实现。参考文件有助于不规则密度步骤。 将参考文件输入 Imatest 后,结果将准确可靠。 |
||||
| Imatest 36 补丁 ITDR36 动态范围测试图表 | 36 | ~0.10 (1/3 光圈); 需要参考文件 目标(非实际)密度: 0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00 1.10 1.20 1.30 1.40 1.50 1.60 1.70 1.80 1.90 2.00 2.10 2.20 2.30 2.40 2.50 2.60 2.70 2.80 2.90 3.00 3.10 3.20 3.30 3.40 3.50 | >2.8 | 8×10” |
| Imatest 36 补丁ITWDR36宽动态范围测试图表(推荐) | 36 | ~0.10 – 0.30 (1/3 – 1 光圈);参考文件必填 目标(非实际)密度: 0.15 0..29 0.42 0.56 0.69 0.83 0.96 1.10 1.24 1.37 1.51 1.64 1.78 1.91 2.05 2.19 2.32 2.46 2.59 2.73 2.86 3.00 3.21 3.43 3.43 3.64 3.86 4.07 4.29 4.50 4.71 4.93 5.14 5.36 5.57 5.79 6.00 | >5 | 8×10” |
| Imatest 36 补丁ITUHDR36超高动态范围测试图表 | 36 | “ ” 目标(非实际)密度: 0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00 1.10 1.20 1.30 1.50 1.70 1.90 2.10 2.30 2.50 2.70 2.90 3.43 3.73 4.02 4.32 4.63 4.92 5.23 5.52 5.82 6.27 6.72 7.17 7.63 8.22 |
>7.5 | 8×10” |
| 最佳对比度分辨率图表 | 20 | 0.25(带 2:1 内部补丁) | 4.75 | 8×10” |
| 柯达摄影步数位板 2 号或 3 号。校准或未校准(通常足够)。 |
21 | 0.15(1/2 光圈)线性模式* | 3.05 | 1×5.5” 较大的 |
| 斯托夫传动步进楔 T4110 | 41 | 0.10(1/3 光圈)线性模式* | 4.05 | 1×9” |
| 丹麦-皮塔 TS30D ( 数字成像页面) | 28 | 0.15(1/2 光圈)线性模式* | 4.2 | (0.4×9”) |
| DSC 实验室 Xyla 15、21 和 26 步 HDR 灰度 | ≥13 | 0.30 ( 1 挡光圈) 线性模式* | 3.7 | (大) |
| 图像工程 TE269(36 个修补程序) (您可以在 ROI 选项窗口中选择旧 TE269 和新TE269V2。 |
36 |
TE269 具有与 Imatest 36 补丁图相似的几何形状,但补丁顺序不同,Imatest 完全支持。有三个标准参考文件可用,它们来自制造商网站上的数据:TE269A |TE269B |TE269C 20 个补丁的 TE241 和 TE264 图表在其最暗的色块 (19-20) 之间具有非常大的光密度 (OD) 步长:1,000,000:1 版本为 2.37 OD = 47.4dB,100,000:1 版本为 1.5 OD = 30dB)。因此,不应将 20 色块 OECF 控制图用于动态范围(尤其是 HDR)测量。36 色块图就是为了克服这一缺点而开发的。 |
4−6 | D280 |
| *线性(单行)图表的区域选择不太可靠,因为很难在非常暗的区域定位要素。 此外,线性图表比具有圆形补丁排列的图表更容易受到渐晕的影响。 |
||||
| 大多数透射式动态范围测试图表需要一个参考文件(通常每行只有一个密度值,但L*a*b*值也可以)。请注意,补丁的对数(亮度)与(–)密度成正比。唯一的例外是Stouffer T4110,TE269和DSC Labs Xyla图表,它们具有一致的密度步长。 | ||||
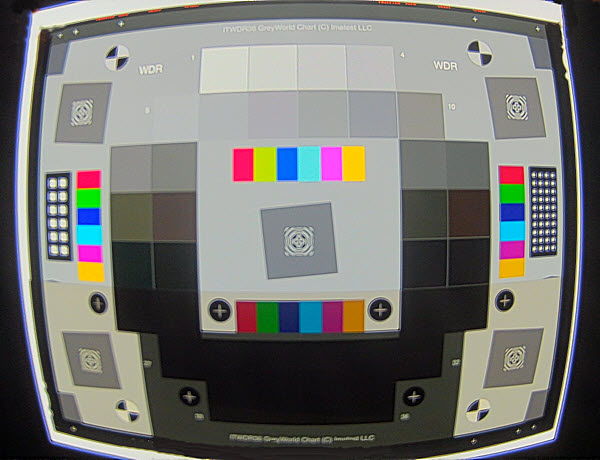
对于传统的动态范围测量,建议使用Imatest 36色块宽动态范围(HDR)测试图表,目标密度步长为0.1至0.3(实际步长可能有所不同;应始终使用单个参考文件进行Imatest分析),最大密度至少为基数+5(~17光圈)。近乎圆形的斑块排列可确保渐晕对结果的影响最小。提供了具有实际密度的 CSV 或 CGATS 参考文件(HDR 图表需要)。该图表在 8×10 英寸胶片上的有效面积为 7.75×9.25 英寸。
它还包含中心和角落的倾斜边缘,对比度为 4:1,用于测量 MTF。套准标记使区域易于选择,Imatest 4.0+ 中提供了全自动区域检测。中性灰色背景有助于确保图表在自动曝光相机中曝光良好(与黑色背景的图表相比,除非手动曝光可用,否则黑色背景可能会强烈曝光过度)。
 Imatest 36 色域动态范围图表 Imatest 36 色域动态范围图表在8×10电影上。最大≈ 3. |
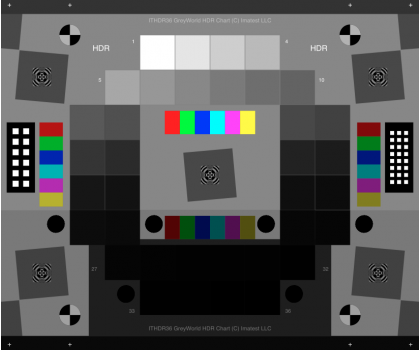 Imatest 36 色片高动态范围图表 Imatest 36 色片高动态范围图表在8×10电影上。最大> 5。 |
该图表采用高精度LVT胶片记录工艺制作,可实现最佳的密度范围、低噪声和精细的细节。
如果有多个手动曝光可用,则可以将标准的 36 色块动态范围图表与动态范围后处理器一起使用,以测量大于 11 光圈的动态范围,但不建议使用此方法,因为耀斑光的重要影响处理不当。
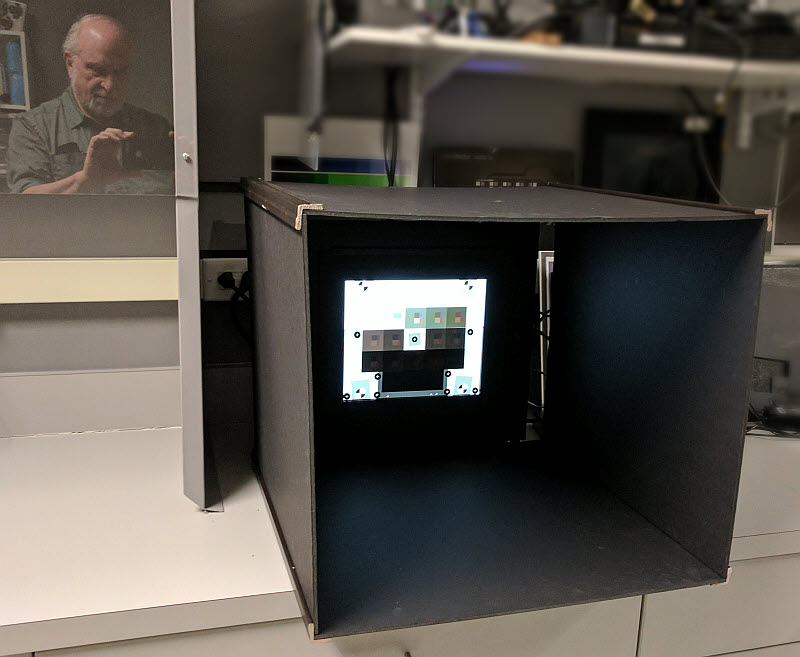
灯箱
 您需要一个可以均匀照亮传输步数图的灯箱。在大多数情况下,9×12 英寸(26×22 厘米)足够大。避免使用薄型或“迷你”型号,它们可能没有足够的照明。荧光灯箱应有高频镇流器以消除闪烁。
您需要一个可以均匀照亮传输步数图的灯箱。在大多数情况下,9×12 英寸(26×22 厘米)足够大。避免使用薄型或“迷你”型号,它们可能没有足够的照明。荧光灯箱应有高频镇流器以消除闪烁。
我们推荐 Imatest LED 灯箱(右侧显示 36 色块 HDR 图表),可从 Imatest 商店购买。它有
- 高度均匀的照明:~95%的均匀性。
- 高质量的光谱响应。标准版本允许您在 3100K、4100K、5100K、5500K、6500K 色温之间进行选择,显色指数 (CRI) 为 97,近红外波长为 850nm 和 940nm。其他色温可作为选项提供。
- 通过硬件旋钮、WiFi 或 USB 在 30-10,000 勒克斯等效范围内调节强度:范围超过 300:1,使其适用于从近日光到极暗光的测量。提供 1 勒克斯的低光设置和高达 100,000 勒克斯的超亮设置版本。
Imatest 商店提供几个灯箱。在灯箱比较指南中有比较。GLE-10 和 GLE-16E 具有很好的色温控制。Imatest LED灯箱和灯板非常可靠,有多种选择。
如何测量动态范围
| 单位 | 缩放 | 笔记 | 使用者 |
| 光圈 | 日志 2 ;二倍 | 也称为区域或EV(暴露值); | 摄影师 |
| 分贝 (分贝) | 20 日志 10 | 1密度单位= 20dB;一个光圈 = 6.02dB | 电气工程师 |
| 密度单位 | 日志 10 ;十倍 | 1 密度单位 = 3.322 光圈 | 光学科学家 |
灯箱和图表显示在黑框中,可最大程度地减少反射回图表的杂散光。 |
 |
|
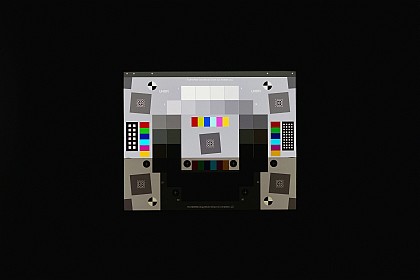 |
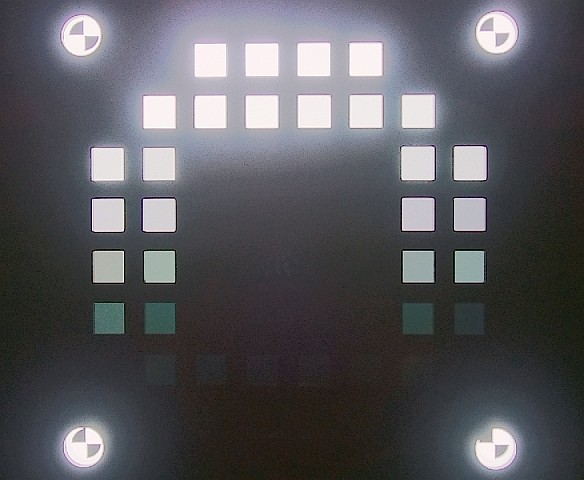
 下面是一个有取景问题的图像示例。来自图表周围灯箱的耀斑光将减小测量的动态范围。除非要测量耀斑的影响,否则请避免这种情况。
下面是一个有取景问题的图像示例。来自图表周围灯箱的耀斑光将减小测量的动态范围。除非要测量耀斑的影响,否则请避免这种情况。
右边的图像还有另一个问题,如左边的裁剪图所示。奇怪的信号处理(锐化)使套准标记难以检测,因此您可能需要手动选择图表区域(而不是使用更方便的自动检测)。- 在一个完全黑暗的房间里拍摄图表。杂散光不应到达目标前方;它会扭曲结果。图表和相机的周围环境应尽可能保持黑暗,以尽量减少耀斑光。
- 仔细曝光,注意避免过度曝光,这在深色背景的图表中很常见。曝光过度的图像具有多个 (>2) 个剪切补丁(在位深度和图像处理的最大允许级别)。在可能的情况下,应使用手动曝光以确保正确曝光:不应剪切超过 1 或 2 个补丁。我们已经看到一半的补丁被剪裁的图像:来自这些图像的DR测量毫无意义。
| 过度曝光会对动态范围测量产生严重的不利影响。原因是从饱和区域辐射出来的耀斑光可能远高于饱和水平(通常为255或65535)所指示的水平。这种耀斑光雾化较暗的区域(比正确曝光的图像的耀斑强烈得多),并且可以将DR降低到远低于正确曝光图像的值。 |
| 反射也可能是一个严重的问题。我们建议用黑色天鹅绒或羊毛覆盖相机附近的所有东西,除了镜头。镜头本身的反射很难避免,但是可以通过放置相机使其反射位于图像的正中心(对于圆形布局的图表)来减轻其影响,以便镜头反射脱离密度斑块。在右侧的亮化图像中,图表中心下方的反射破坏了密度图块的测量。拍照时很容易错过,但是当图像变亮时(在这种情况下为色调映射)时,可能会非常明显。相机需要稍微抬高,才能从密度块中取出反射。 |
-
对于具有透明单位(透明胶片光源)的平板扫描仪,您只需将台阶表放在玻璃上即可。杂散光应该不是问题,尽管将其保持在最低限度并没有什么坏处。35mm胶片扫描仪可能难以测试,因为大多数扫描仪只能扫描35mm胶片段。(大多数透射目标更长。
- 如果可能,请以 16 位(或更高)格式保存图像。请注意,JPEG 图像始终为 8 位(像素级别 0-255)。这会严重影响动态范围测量,尤其是对于HDR相机。
- 按照运行颜色/色调设置(以前称为多图表、颜色/色调自动(以前称为多重测试)或步进图(不建议用于新作品的旧模块)的说明来分析图像。
-
请务必在“设置”窗口中选择正确的图表类型。这些程序支持各种线性(单行)和多行(通常以圆形排列)图表。
|
您必须输入参考文件才能获得 36 面体动态范围图表的有效结果。每个 36 个补丁图都提供单独测量的参考文件。(如果您丢失了该文件,我们通常可以找到该文件。有关更多详细信息,请转到颜色/色调交互 — 参考文件。 还建议参考文件测量对比度分辨率图表和所有透射图表中的色调响应 (OECF) 或动态范围。 |
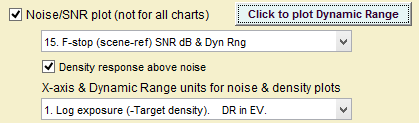 提示:为了方便在颜色/色调自动(多重测试)中绘制动态范围图,我们在设置窗口中添加了一个按钮。按下它可输入 DR 显示的正确设置(检查噪声/SNR 图,然后选择 15。光圈…信噪比和高于噪声的密度响应)。X轴和DR单元不受影响。 提示:为了方便在颜色/色调自动(多重测试)中绘制动态范围图,我们在设置窗口中添加了一个按钮。按下它可输入 DR 显示的正确设置(检查噪声/SNR 图,然后选择 15。光圈…信噪比和高于噪声的密度响应)。X轴和DR单元不受影响。 |
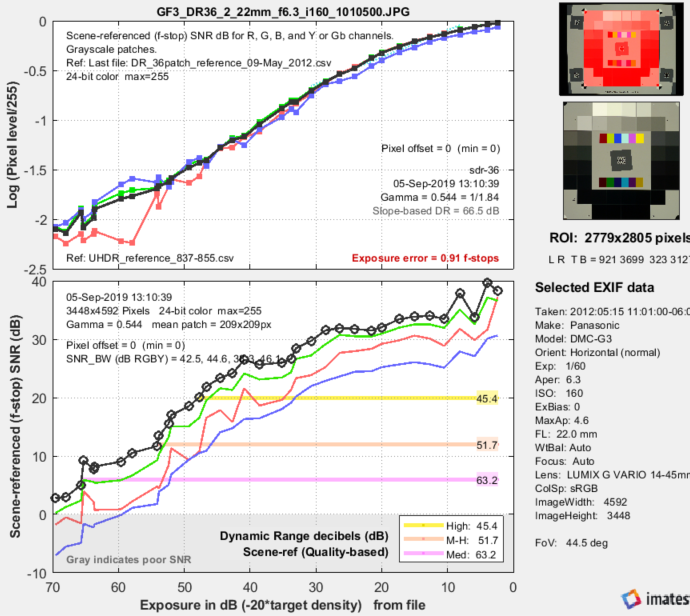
以下是松下G3(具有3.75微米像素间距的微型四分之三相机)在ISO 160下的颜色/色调和步进图结果,使用dcraw从原始数据转换,具有以下设置:去马赛克:正常RAW转换(去马赛克),输出伽玛:2.2,白平衡:相机,输出色彩空间:48位,质量:默认。
 松下G3,ISO 160,使用dcraw转换,使用Multitest运行。
松下G3,ISO 160,使用dcraw转换,使用Multitest运行。
两个图左侧的灰色区域是对数(像素级)与(对数)曝光(对比度)的斜率<最大斜率 0.075 * 的地方。该区域的图像由于其极低的对比度而毫无用处。下图底部的灰色区域是场景参考信噪比< 0 dB(信噪比< 1)的地方。该区域的图像是无用的,因为噪声会压倒信号。
| 动态范围图例 | 线条颜色 | 质量水平 | 信噪比 | 信噪比 (分贝) |
|
动态范围是曝光范围,其中
|
L(低) | 1 | 0 | |
| M(中) | 2 | 6 | ||
| M-H (中高) | 4 | 12 | ||
| H(高) | 10 | 20 |
 虽然基于斜率的动态范围大于11光圈(66dB),但它毫无意义,因为它包括SNR低于0 dB的补丁,其中噪声压倒了可见特征,即没有可见的图像细节。
虽然基于斜率的动态范围大于11光圈(66dB),但它毫无意义,因为它包括SNR低于0 dB的补丁,其中噪声压倒了可见特征,即没有可见的图像细节。
低质量水平(场景参考信噪比 = 1 = 0dB)下的 DR 为 8.7 f-stop(52.4 dB),在高质量水平 (SNR = 10 = 20dB) 下降至 5.17 f-stop。这些结果与 24 位原始转换类似。
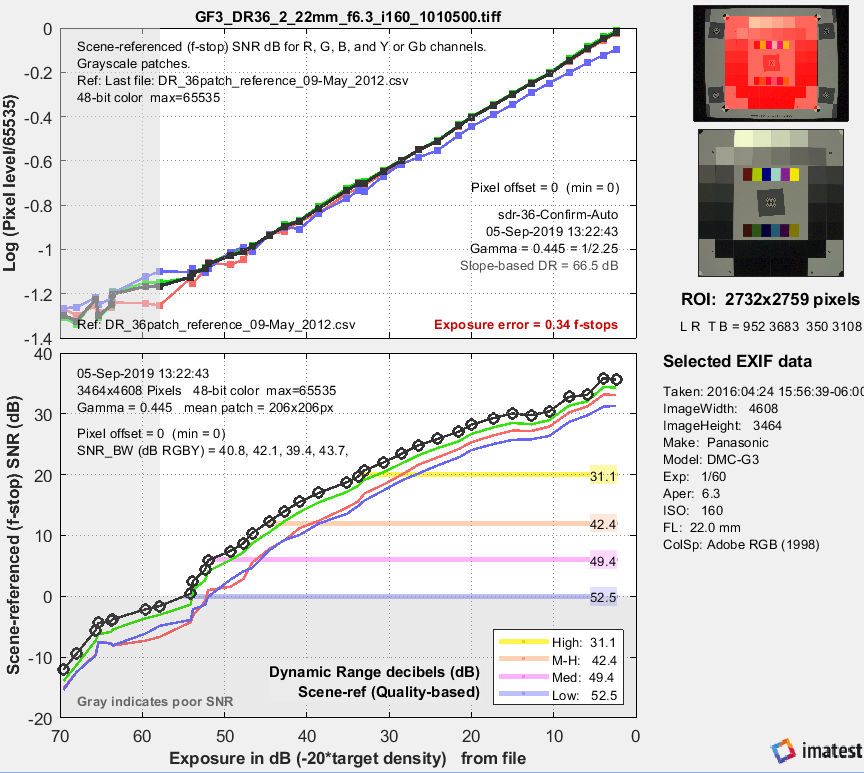
相同的松下G3映像,使用Stepchart运行。
单击图像进行全尺寸显示。
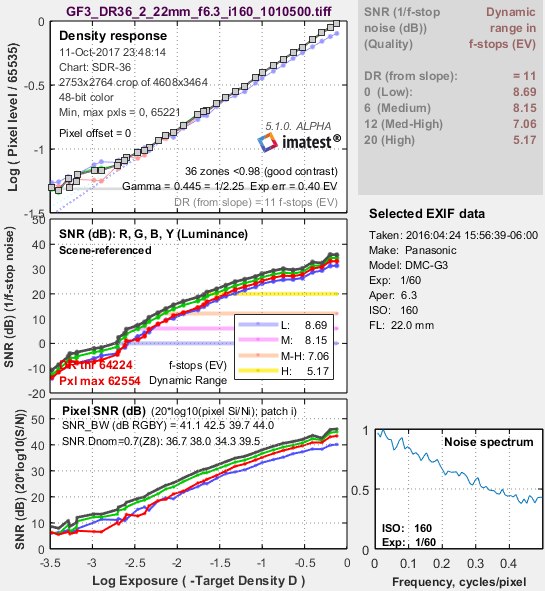
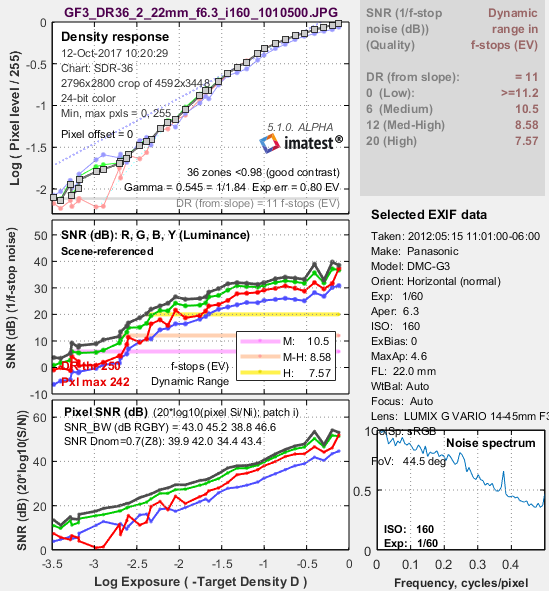
响应曲线的形状是转换软件设置的强功能。下图是相同的曝光,保存在相机内作为JPEG文件。请注意,传递曲线完全不同:它在高光中有一个“肩部”,通过减少高光饱和的趋势(“烧坏”)来提高图像质量。由于软件降噪(在dcraw转换中不存在),动态范围增加。
 松下G3,ISO 160,相机内JPEG,使用彩色/色调自动(多重测试)运行。注意“肩膀”。
松下G3,ISO 160,相机内JPEG,使用彩色/色调自动(多重测试)运行。注意“肩膀”。
由于软件降噪,动态范围得到改善。
 在步进图中,可以在X轴刻度(图2-4)和动态范围单位(图2)下拉菜单中设置显示动态范围的单位。要将光圈的动态范围转换为分贝(dB),传感器数据手册中通常给出的测量值,将光圈的动态范围乘以6.02(20 log 10 (2))。低质量的动态范围(光圈噪声 = 1;SNR = 1)与数据手册上的数字最接近。(有效的传感器动态范围测量需要完全原始图像。
在步进图中,可以在X轴刻度(图2-4)和动态范围单位(图2)下拉菜单中设置显示动态范围的单位。要将光圈的动态范围转换为分贝(dB),传感器数据手册中通常给出的测量值,将光圈的动态范围乘以6.02(20 log 10 (2))。低质量的动态范围(光圈噪声 = 1;SNR = 1)与数据手册上的数字最接近。(有效的传感器动态范围测量需要完全原始图像。
松下G3,ISO 160,相机内JPEG,
使用步骤图运行。单击图像进行全尺寸显示。
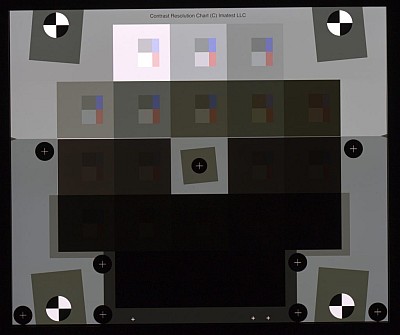
对比度分辨率图表
开发对比度分辨率图表是为了克服从灰度图得出的标准DR测量的关键限制。我们正在努力对其进行标准化,特别是在IEEE P2020汽车系统图像质量标准中。在2018年电子成像大会上发表的描述对比度分辨率图表的论文可以在这里下载。
 理解对比度分辨率图表的关键是,当动态范围预测低对比度特征在一系列色调上的可见性时,可以更有意义地定义动态范围,即回答以下问题:“低对比度特征在图像的黑暗(或明亮)区域中是否可见?标准 DR 测量无法为这个问题提供清晰、明确的答案。
理解对比度分辨率图表的关键是,当动态范围预测低对比度特征在一系列色调上的可见性时,可以更有意义地定义动态范围,即回答以下问题:“低对比度特征在图像的黑暗(或明亮)区域中是否可见?标准 DR 测量无法为这个问题提供清晰、明确的答案。
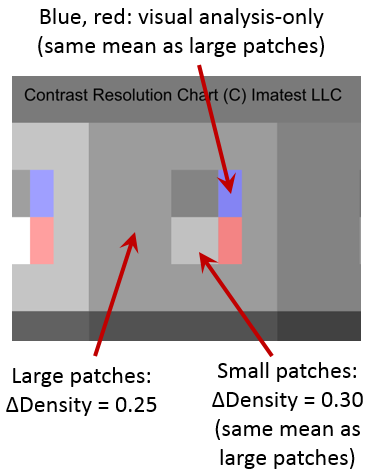
对比度分辨率图表由 20 个大色块组成,覆盖 95 dB 音调范围。每个大补丁包含四个较小的补丁。浅灰色和深灰色斑块具有2:1(6 dB)的对比度(100%韦伯对比度),并且与周围的大斑块具有相同的平均密度。它们之间的差异定义了新开发的对比度分辨率信噪比(SNR CR )测量的信号,其中噪声在较大的灰色斑块中测量,具有更好的噪声统计。此信号不会因耀斑光、未校正的黑电平偏移或色调映射而失真。红色和蓝色图块仅用于视觉分析。
 在我们多说之前,我们必须回答这个问题,
在我们多说之前,我们必须回答这个问题,
“当传感器具有高达150 dB的动态范围时,为什么只有95 dB,并且DR竞争非常激烈?(這場比賽有點類似於1950年代的汽車馬力比賽,當電視喜劇演員採用這句話時,“除了加油站,我的車可以通過路上的任何事情。
答案是,我们还没有看到真正实用的相机,其动态范围(始终受到耀斑光的限制)达到95 dB,更不用说超过它了。(此外,制造具有更高音调范围的此类实用图表的成本更高)。期望在高达 150 dB DR 的传感器提供更高动态范围的客户可能对在传感器和测试图表或场景之间放置镜头的严酷现实不满意。如果您的相机的动态范围超过 95 dB,请 marketing@colorspace.com.cn与我们联系。
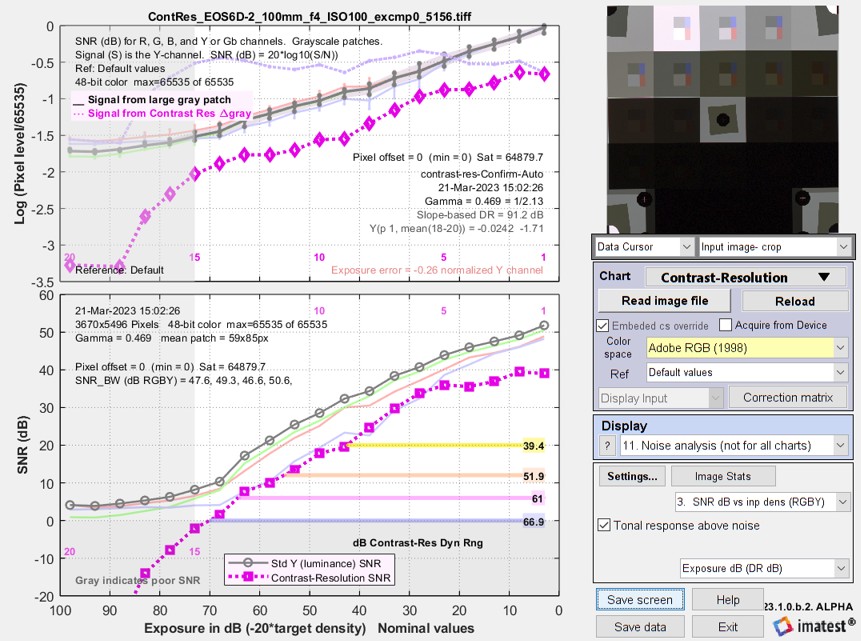
标准 (—) 和对比度分辨率 (—) 信号(顶部)和 SNR(底部)。注意 dB = 20*密度。
以下是对比度分辨率测量的简要说明。有关完整详细信息,请参阅对比度分辨率页面。
右边的示例在Color/Tone Interactive上运行,使用佳能EOS-6D和100mm f / 2.8微距镜头在f / 4下拍摄的对比度分辨率图表的图像,转换为48位彩色文件(位深度= 16) – 非常高质量的数码单反相机和镜头,但未专门作为HDR(高动态范围)销售。
在标准DR分析中用作信号的大灰色斑块的对数像素水平在上图中显示为细黑线。对比度分辨率信号(明暗级别)显示为粗洋红色线条。
下图显示了标准信噪比(细黑线)和对比度分辨率信噪比(SNR CR ),其中信号是小的明暗色块电平,噪声是在较大的相邻灰色区域中测量的。彩色水平线是对比度分辨率动态范围 (DR CR ),对应于 SNR CR = 20、12、6 和 0 dB(信噪比 = 10、4、2、1;乐观地指定为“高”、“中高”、“中”和“低”质量)。小斑块在SNR = 20 dB时清晰可辨(高质量),但在0 dB时几乎无法区分(低质量)。
|
右侧的图像以恒定的平均像素级别显示所有色块,从而可以轻松可视化噪点的影响。2:1(100% Weber)对比度特征在补丁 1-13 中清晰可见,在补丁 14 和 15 中严重褪色,并且几乎超出了这个范围。补丁 13 具有大约 7.7 dB(20*log 10 (2.43))的对比度分辨率 SNR。 对比度分辨率动态范围 DR 的定义 CR 基于信噪比 CR 大于上述指定水平(20、12、6 和 0 dB;信噪比 = 10, 4, 2, 1)。请注意,SNR CR = 1(用于在常规测量中定义DR)对应于非常糟糕的图像质量,其中特征只有在您确切知道预期结果时才略微可见。 |
单击图像以显示它们 全尺寸图像 带有标准化补丁的图像 具有相同的平均像素级别。 |
对比度分辨率图表的一个关键优点是,它在存在色调映射(一种保持局部对比度的非均匀色调压缩)的情况下提供了良好的结果。色调映射广泛用于用于人类观看的 HDR 图像(在动态范围有限的显示器上)。标准灰度图不能为色调映射图像提供可靠的结果。对比度分辨率图表结果也不会因耀斑光和未校正的黑电平偏移而失真。
我们必须再次声明,尽管我们认为对比度分辨率图表提供了系统性能的卓越指示,但它还不是行业标准。我们正在积极努力。有关更多详细信息,请参阅对比度分辨率页面。
提示和测量建议
测量动态范围时需要考虑许多事项。最重要的是,动态范围测量受到来自场景(即图表)的耀斑光、图像处理(尤其是位深度、黑电平偏移、降噪和色调映射)的强烈影响。实验设置至关重要。
| 应尽量减少反射回测试图表前面的环境光。它会严重降低 DR 测量,尤其是对于 HDR(DR > 100dB)系统。要特别小心,避免镜头反射(镜头应位于图表中间,测量区域之外)。 测试环境应完全变暗。在可能的情况下,墙壁应该是黑暗的。应使用黑布遮盖灯光,光线表面可能会将光线反射回图表。杂散光是DR测量误差的主要原因。 |
对于 36 面体动态范围或对比度分辨率图表(如上所示),如果可能,图像中的图表大小应至少为 600×600 像素。对于高分辨率相机,它不需要填充图像。2000×2000 年的图表图像对于高分辨率相机来说绰绰有余。
我们强烈建议不要使用 20 个补丁的 OECF 图表,因为最暗的补丁之间可能具有非常大的密度步长,从而严重影响测量精度。
耀斑光(在镜头元件和镜筒之间反弹后到达图像传感器的杂散光)是DR最重要的实际限制因素。它可以采取阴影中的雾(遮蔽眩光)或鬼影(难以测量)的形式。耀斑光可以来自图表内的光源区域或光源,也可以来自图表外部(在实际情况下)。因此,测试图表的选择会对DR测量产生重大影响。耀斑引起的测量误差如下所述。
如果可能,应在从原始格式(传感器输出)转换的图像中测量DR,处理最少,如果可能,位深度至少为16。这可以在Imatest中使用dcraw或Readraw完成,它们不应用色调响应曲线,锐化或降噪,因此对DR的影响相对较小。
动态范围可以通过颜色/色调交互、颜色/色调自动和步进图(功能有限的传统模块)来测量。建议使用颜色/色调交互和自动,因为它们比步进图更新,并且具有更多的噪点分析细节。
图像处理可以分为两类:在原始转换期间常规完成的处理和之后应用的后处理。两者都会影响 DR 测量。
原始转换将传感器的输出转换为标准图像格式。它包括几个功能(一些可选)。下面列出的所有功能通常在相机内原始转换期间应用(通常使用 JPEG 输出)。在Imatest中执行的RAW转换(使用dcraw或Readraw)不应用色调响应曲线,锐化或降噪,因此对DR的影响相对较小。
- 去马赛克(将拜耳 RGRG/GBGB 格式转换为全彩色,每个像素中都有 RGB)对动态范围的影响相对较小。
- 伽玛曲线 大多数可互换的文件都是伽玛编码的,即它们旨在以与像素级别 gamma 成比例的亮度显示(伽玛通常= 2.2)。最简单的伽玛编码是像素级=场景亮度 (1/2.2) 。当转换后的图像的位深度为 8(非 HDR 图像通常如此)时,Gamma 编码会显著改善动态范围。8 位线性图像的动态范围有限,因为它们在黑暗区域中的电平很少。
- 音调响应曲线 (TRC)。除伽玛系数外,还经常使用。应用于高光的“肩部”(对比度降低)是色调响应曲线最常见的特征,但暗区也可能受到影响。TRC肯定会影响DR测量(尤其是基于斜率的DR),并且可以以复杂的方式做到这一点。
- 锐化通常在边缘附近进行,但可能不会应用于测量 DR 的平坦区域。
- 降噪(低通滤波)通常在测量DR的平坦区域进行。降噪可以对DR测量产生深远的影响,通常使它们比实际更好。SNR = 1是某些标准中DR限制的标准,可能永远无法达到。
- 色彩校正矩阵 (CCM) 和白平衡 (WB)。CCM 会增加噪声,尤其是在颜色增强时。但大多数时候,CCM对DR测量的影响很小。
原始转换后可以应用其他图像处理。
- 位深度 大多数可互换图像的位深度为 8,这会限制 DR,尤其是对于线性图像。位深度 = 8 对 Gamma 编码图像的危害较小。位深度 = 16 或更大的影响要小得多。
- JPEG 高质量 JPEG 压缩对 DR 影响不大,低质量 JPEG 压缩会弄乱 DR(以及所有其他图像质量测量),切勿用于 DR 测量。JPEG的真正问题是相机内处理(尤其是如上所述的降噪)会严重影响DR,而8位深度限制了DR。使用以最少的图像处理将原始图像转换为位深度为 16 或更大(48 位颜色)的图像,可以获得最可靠的结果。
- 当需要在动态范围有限的设备上查看HDR图像时,会执行色调映射(这意味着实际上几乎所有图像都是如此)。色调映射在相对较大的区域(如灰度测试图色块)中压缩色调,同时在小区域(局部对比度)保持色调对比度。它通常可以通过非常低的伽马值(<0.25;远低于大多数色彩空间使用的0.45值)来识别。在对比度分辨率图表的页面中对此进行了讨论。
|
色调映射通过增加局部对比度(在小区域)同时降低全局对比度(与测量的伽玛相关),使对象(尤其是在黑暗区域)更加明显。它会导致灰度斑块中的响应不均匀,并且还可以通过打破像素级别和图表密度之间的单调关系而导致色调响应不规则。这可能会导致意想不到的结果,并且通常会使动态范围测量变得混乱。 我们建议使用色调映射图像的对比度分辨率图表,或者更好,在测量动态范围时完全避免色调映射图像。 |
色调映射会降低在标准灰度图表上测量的对比度,这不会指示局部对比度的保留程度。(对比度分辨率图表和分析旨在测量局部对比度。可以使用图像处理模块研究色调映射,该模块允许您打开任何图像,添加噪声噪声和其他降级,然后应用图像增强功能,包括 Matlab 支持的三种色调映射类型(色调映射、局部色调映射和对比度限制自适应直方图均衡)。我们发现色调映射往往对噪声水平的微小变化很敏感。(当然,相机可能会使用完全不同的算法。
色调映射相当容易识别。测得的伽玛远低于标准色彩空间图像的典型值(约0.5),并且色块级别可能不会单调降低。下面的图像统计示例显示了色调映射的证据。色调映射对DR测量的影响不容易预测:它应该被视为一个完整的通配符。色调映射图像的动态范围测量不可靠。
基于斜率的动态范围(有时被认为是总动态范围,因为它往往大于基于SNR的动态范围测量值)定义为密度曲线斜率大于最大斜率的7.5%(在暗面)和小于饱和度水平的98%(在亮面)的曝光范围。由于色调映射降低了最大斜率,因此增加了基于斜率的 DR。基于斜率的DR在其范围的黑暗部分通常具有极低的SNR,为−10 dB或更差,这使得即使没有色调映射,也非常不一致。
- 通常应用于图像的像素级(黑电平)偏移(基座)对DR测量有显著影响。它们可以通过较暗斑块中响应曲线(对数像素水平)的扁平化来识别(尽管它们可能与耀斑混淆)。
如果存在偏移量,则应将其删除。默认偏移设置为 0。要在“颜色/色调交互”中减去偏移,请单击“设置”按钮(如果可见)或“设置”下拉菜单,然后单击“颜色矩阵”和其他设置…“偏移”设置位于“设置”窗口的左下角。如果设置不同于默认值 0,则该设置将显示为黄色。偏移也可以在原始转换期间使用广义原始读取进行校正。
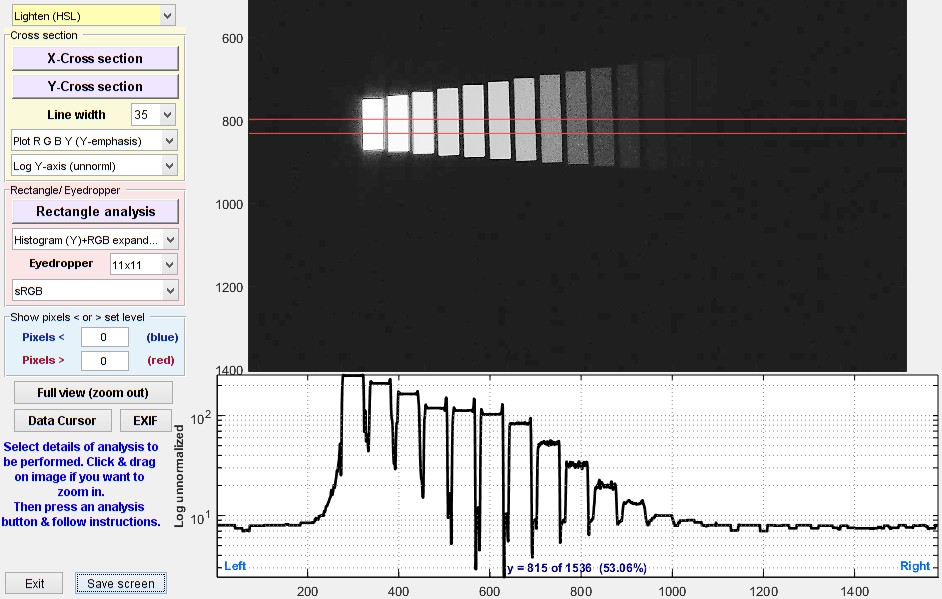
图像统计横截面显示显示减轻的XYLA图表。黑电平偏移可能为 8 位。
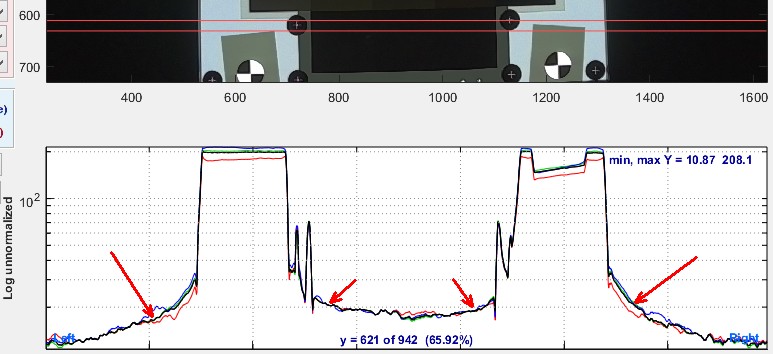
图像统计模块可用于检查图像的色调映射、耀斑光、像素电平偏移和其他意外情况。它提供了在测试 DR 时可能有用的信息。该示例显示了一个 XYLA 控制图(密度步长 = 0.3 的线性控制图),该控制图旨在最大程度地减少耀斑(较亮的色块相对较小)。下面的图像显示为浅色(这不会影响图像下方的数字结果)。下图是图表的 35 像素宽横截面(平均以减少噪声)。在图表补丁之外的黑色区域中,像素偏移似乎为8,尽管它可能是远程耀斑光(均匀影响图像)。在最亮斑块左侧约60像素处可以看到一些短程耀斑。它实际上控制得很好;我们看到了更糟糕的情况。
补丁 4-6 中响应的扁平化表示已应用色调映射。如果不是由色调映射引起的,这意味着在这些密度下不会有图像对比度 – 这是一个不可接受的结果。在这种情况下,对比度分辨率图表提供的信息根本无法从直接灰度图表中获得。
请注意,图表右侧像素电平的降低(大约 x ≥ 1500)错误地增加了从斜率开始测量的动态范围。区分耀斑导致的像素级别降低与由于斑块密度导致的像素级别降低的最佳方法是使用不同的图表设计,例如对比度分辨率图表。
|
镜头反射是中程耀斑光的主要原因。未镀膜的玻璃表面(折射率≅ 1.5)反射入射在其上的光的R = 4% = 0.04。(请记住,一块玻璃或透镜组件有两个表面。
根据爱特蒙特光学的说法,最好的减反射涂层在可见光谱(~400-700nm)上的R ≅ 0.4% = 0.004。R = 0.005 对于合理的入射角范围可能更真实。从每次二次反射反射回传感器的光为 R = 0.000025 = 2.5*10 -5 = -92 dB (20*log 10 (R 2 2 ))。二次反射N sec 的数量随着透镜中分量M(粘合在一起的元件组,每个元件具有两个空气到玻璃表面)的数量而迅速增加:1对1分量;6 代表 2 个组件;15 代表 3 个组件;28 代表 4 个组件;45 个用于 5 个组件等。对于 M 组件, Number of secondary reflections==∑=12−1=2(2−1)/2=(2−1)) M = 5 个组件是高质量照相手机的典型特征;M ≥12组件在数码单反变焦镜头中司空见惯。整体镜头眩光没有二次反射次数所暗示的那么严重,因为杂散光没有覆盖整个图像。它随着与明亮区域的距离而减少。很容易理解为什么实用的相机动态范围测量被限制在70-90dB左右,即使传感器动态范围要高得多。
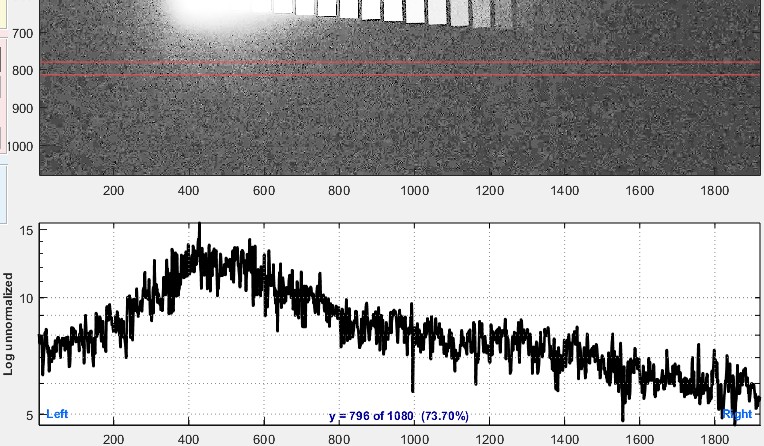
图像统计 汽车摄像头对比度分辨率图像的横截面,显示空间变化的耀斑
由于ISO 18844光晕模型不测量由镜头反射引起的空间相关光晕,因此它在表征实际系统性能方面的价值有限。 |

噪声的影响
噪声是一个随机随机过程。当噪声相对于信号电平(低SNR)较高时,会对测量一致性产生很大影响。特别是,基于斜率的动态范围已在上面的几个地方进行了讨论。这种测量的一个关键问题是,在较暗的极限下,SNR通常非常低(−10 dB或更差)。(它也可能受到色调映射和耀斑光的影响。因此,我们不建议使用它。
线性图表(如XYLA控制图(具有21个或更多动态范围的光圈)中的区域选择可能非常困难,因为(a)在原因的较密集部分很难看到暗斑,(b)它受到光学失真的影响,这很难校正,(c)它可能受到梯形失真的影响(也可以纠正, 但相当困难)。不幸的是,区域选择中的小误差会严重影响测量。这个问题是我们设计 36 个色块动态范围图表(以及对比度分辨率图表)的主要原因,这两个图块都有以圆形模式排列的补丁,带有套准标记,用于自动区域选择(如果自动不起作用,则可以轻松手动选择)。
耀斑光限制动态范围
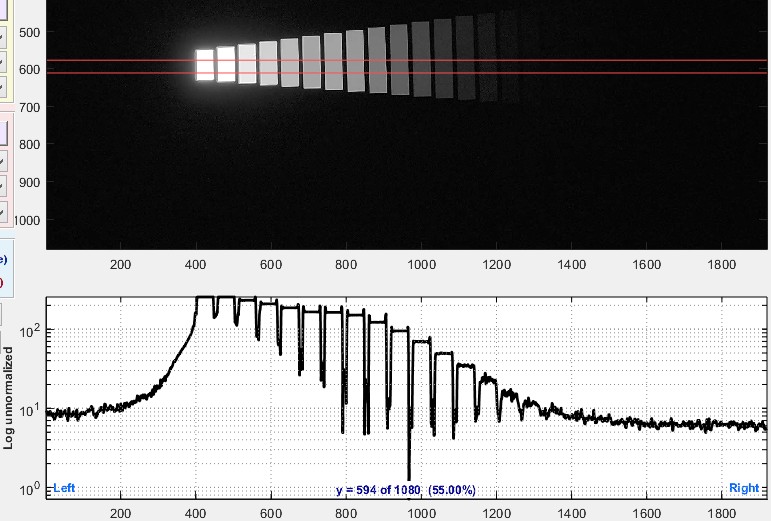
以下是在 Imatest 5.2 中运行的耀斑光限制图像的示例。在圆形图表中(与线性图表不同),耀斑光在较暗区域垂直于补丁序列(从左到右)的方向(从上到下)下降。这使得当图像受到耀斑光的限制时相对容易识别,因为密度响应曲线斜率下降到零。这在下图的上部(密度)图中很明显,其中斜率在 75-100 dB、105-140 dB 之间变平,然后超过 145 dB——对应于图表底部的第 6 行到第 8 行补丁。
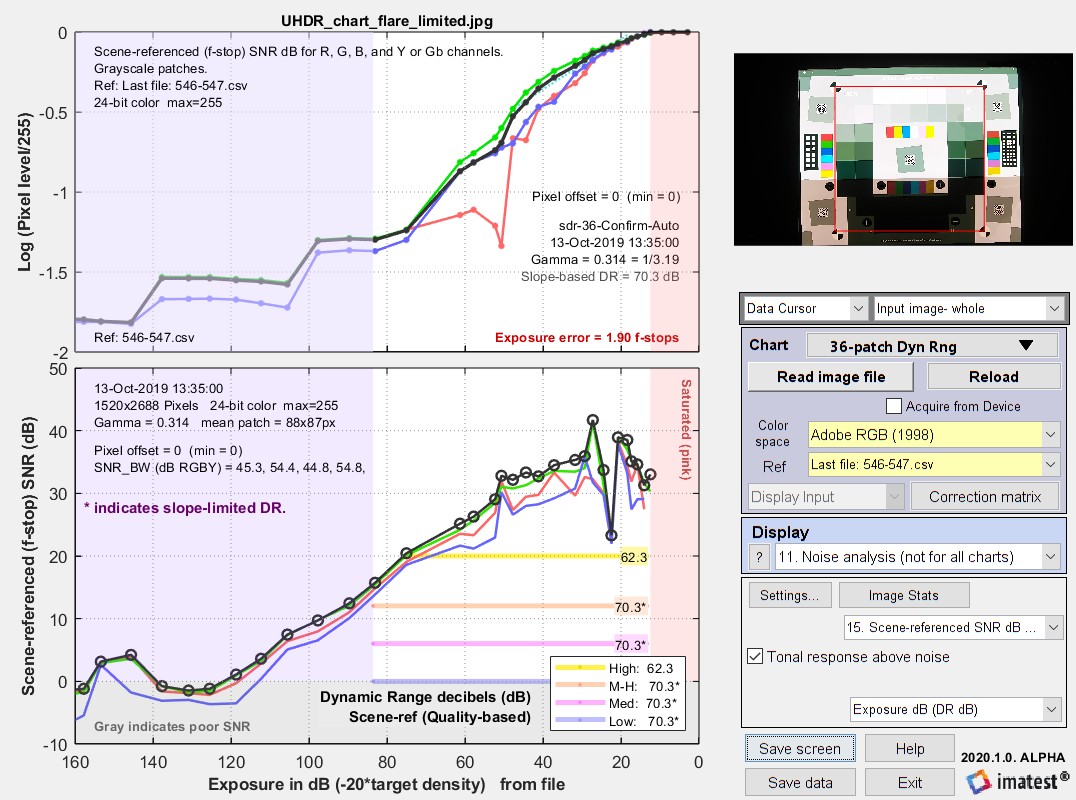 36 面 UHDR 图表的耀斑光限制动态范围结果
36 面 UHDR 图表的耀斑光限制动态范围结果
在此图像中,场景参考信噪比(dB)保持在0以上到超过曝光= -120 dB,但斜率(上图)在-85 dB左右开始变平。如果没有斜率限制,它将是 120 dB 或更高。
技术细节
场景参考噪声和信噪比

补充知识:
一般而言,人类的眼睛所能看到的范围是10^5左右,但是一般的显示器,照相机能表示的只有256(即2^8个亮度数量级)种不同的亮度。
EV及曝光的相关解释:曝光值(Exposure Value,简写做EV)实际有三方面意义:
1)作为相机设置参数,曝光值指光圈、快门和ISO三者的组合。
2)作为曝光量,曝光值原本指成像元件/胶卷接受光线的多少,现在主要是作为曝光效果的衡量单位,也是曝光补偿的单位。
3)作为测光值,曝光值表注:将曝光量转化到照度 生活中没有人用EV来描述环境的照度,照度是描述环境接受的光照的强度的物理量。之前提到光比,光度学材料指出:相差n EV的曝光量,也就是2^n的光比(光比就是“光照强度”的比值,“光照强度”就是“照度”)。表示被摄物体/场景的亮度,自然也用于衡量被摄场景的反差、动态范围。
其他相关阅读:
联系我们:
感兴趣的朋友,可在下方评论区留言,通过以下方式联系我们:发送邮件至 marketing@colorspace.com.cn,或拨打热线 400-886-3881!分享您的看法或提出您的问题!也欢迎点击表单填写您的需求。轻松一赞👍,快乐无限!喜欢就点个赞吧!

Was this helpful?
23 / 5

{kind=link}