发布时间:2013-02-23
前言(Forward)
标准制定机构
- 本文件由ISO/TC 42(摄影技术委员会)准备。
标准版本和变更
- 这是该标准的第四版,取代了第三版(ISO 15739:2017),并进行了技术修订。
- 主要变更包括:修改、增加和删除了一些术语和定义;修订了相机噪声、信噪比和DSC动态范围的计算程序以提高测量精度;明确了结果的呈现方式;修订了噪声分量分析的描述以提供更多细节;修订了视觉噪声的测量方法以更贴近人类视觉系统;修订了从图像信号中移除低频变化的方法,并将该方法从资料性变更为规范性处理;修订了确定信噪比的程序;增加了将视觉噪声感知均匀映射到噪度JND的介绍。
引言 (Introduction)
引言部分主要阐述了噪声在电子静态成像中的重要性以及测量噪声的方法对于评估图像质量和相机性能的重要性。以下是该部分的详细内容:
噪声的重要性
- 噪声是电子静态成像的一个重要属性。如果相机捕获的图像中存在显著的噪声水平,那么物体的细节纹理在复制过程中会丢失,图像的可见度会降低。因此,测量噪声的方法非常重要,它们提供了与评估捕获图像的图像保真度和噪声可见度相关的的重要信息。
- 测量方法对于评估相机性能相对于这些图像质量因素也很重要。
噪声的主要来源
- 捕获图像中噪声的主要来源包括光子散粒噪声、暗电流散粒噪声、图像传感器的模拟处理读出噪声以及A/D转换器的量化噪声。这类噪声源向捕获的静态图像添加了空间随机噪声,其空间模式逐帧不同。
- 另一种噪声源包括暗电流模式噪声、行/列模式噪声和图像传感器的光响应非均匀性。这类噪声源也在捕获的图像中引入了空间随机噪声;然而,其空间模式在相同的拍摄条件下不会改变。
拍摄条件对噪声水平的影响
- 这些源在输出图像中引入的噪声水平高度依赖于拍摄条件,如相机的曝光时间、光圈值和ISO感光度。相机操作温度也是一个影响因素。此外,一些相机处理,如对比度放大和噪声降低,除了噪声水平本身外,还严重影响噪声谱。
图像质量指标
- 本文件描述的图像质量指标是从观察者查看的输出静态图像中空间分布的噪声测量得出的。这些指标包括内部相机处理对噪声谱和水平的影响。
观察者如何感知图像中的噪声
- 观察者在查看输出图像时,除了噪声水平本身外,还有几个因素影响他们对图像中噪声的感知。观察者根据被观察区域的表观色调、存在噪声的亮度和颜色通道、噪声谱以及观看条件不同,对噪声的看法也不同。
标准的目标
- 本文件规定了测量数字静态相机的噪声和相关指标的方法,考虑了这些影响因素。测量条件被指定为最小化干扰因素的影响,确保时间和空间统计属性的变化可以忽略不计,并提供对噪声水平的良好估计。
测量方法
- 本文件主体规定了测量输入参考噪声、信噪比和DSC动态范围的方法。噪声是使用从相机输出信号线性化的图像信号中测量的均方根值估算的感知噪声。
- 空间随机噪声的两种类型,时间和固定模式,是通过对多个捕获的图像应用噪声分量分析来确定的,详细内容见附录A。
- 附录B描述了使用旨在预测图像感知质量的人类视觉模型来测量视觉噪声(一个输出参考噪声指标)的程序。该模型加权噪声的频谱成分,并考虑了噪声谱、观看条件以及亮度和颜色通道之间感知差异。该指标已被证明与图像中噪声的人类感知高度相关。
- 由于镜头遮蔽和非均匀测试图表照明,可能会在捕获的图像中引入低频变化。由于这些变化可能影响噪声测量,因此提供了一种从图像中移除低频变化的方法,见附录C。
- 附录D提供了确定信噪比的推荐逐步程序。
- 附录E描述了不同输出媒体的实际观看条件的建议。
- 附录F引入了将视觉噪声感知均匀映射到噪度JND的介绍。
范围 (Scope)
这部分明确了文件的范围,即规定了测量和报告数字静态相机的噪声与信号水平和动态范围的方法。适用于单色和彩色电子数字静态相机。
规范性引用文件 (Normative references)
列出了在文本中引用的文件,这些文件的部分或全部内容构成了本文件的要求。包括ISO 554、ISO 7589:2002、ISO 12232:2019等标准。
术语和定义 (Terms and definitions)
这一部分详细定义了与ISO 15739:2023(E)标准相关的一系列专业术语,以确保在标准的应用和解释中具有统一的理解。以下是一些关键术语的定义:
3.1 相机光电转换函数(Camera opto-electronic conversion function,简称OECF)
- 定义:输入场景对数照度与光电数字捕获系统输出像素值之间的关系。
- 说明:照度(L)的单位是cd/m²,对数照度是无量纲的,表示为log₁₀(L/L₀),其中L₀=1cd/m²。
3.2 剪裁值(Clipping value)
- 定义:像素值在曝光进一步增加(高光剪裁值)或进一步减少(暗部剪裁值)时保持不变。
3.3 数码静态相机(Digital still camera,简称DSC)
- 定义:从固态光电传感器的数字化输出中产生数字静态图像,并使用数字存储器(如可移动存储卡)记录数字静态图像的相机。
3.4 DSC动态范围(DSC dynamic range)
- 定义:输入信号(照度或曝光)饱和水平与至少具有1的信噪比的最小输入信号水平的比率。
3.5 曝光时间(Exposure time)
- 定义:光电传感器能够整合场景光线以形成图像的总时间周期。
3.6 焦平面光电转换函数(Focal plane opto-electronic conversion function,简称focal plane OECF)
- 定义:输入焦平面对数曝光与光电数字图像捕获系统输出像素值之间的关系。
- 说明:曝光[H]的单位是lx-s。对数曝光是无量纲的,表示为log₁₀(H/H₀),其中H₀=1lx-s。
3.7 图像传感器(Image sensor)
- 定义:将入射电磁辐射转换为电子信号的电子设备。
- 示例:互补金属氧化物半导体(CMOS)图像传感器和电荷耦合器件(CCD)图像传感器。
3.8 噪声(Noise)
- 定义:成像系统中不希望的变化响应。
3.8.1 总噪声(Total noise)
- 定义:由固定模式噪声(3.8.2)和时间变化噪声(3.8.3)组成的所有不希望的变化,这些变化是在单次曝光捕获的图像信号中的值。
3.8.2 固定模式噪声(Fixed pattern noise,简称FPN)
- 定义:在相同照明、光圈值、积分时间和ISO感光度设置下,图像信号中值的不希望的空间像素变化,这些变化在帧与帧之间保持不变。
3.8.3 时间变化噪声(Temporal noise)
- 定义:由于传感器暗电流散粒噪声、光子散粒噪声、模拟处理和量化引起的图像信号值的变化,这些变化在帧与帧之间不同。
测试条件 (Test conditions)
测试条件部分详细说明了在测量数字静态相机(DSC)噪声时应遵循的标准环境和操作条件,以确保测试结果的一致性和可重复性。以下是该部分的主要内容:
4.1 通用
- 描述了测量DSC噪声时应使用的通用测量条件。如果无法或不适宜达到这些标准操作条件,应报告实际的操作条件。
4.2 照明
- 4.2.1 特性:应指明使用的照明是否符合标准摄影日光或钨丝光源。
- 4.2.2 日光照明:对于不带相机镜头的日光测量,应使用符合ISO 7589:2002中规定的ISO感光度日光光源。
- 4.2.3 钨丝照明:对于不带相机镜头的钨丝测量,应使用符合ISO 7589:2002中规定的ISO感光度钨丝光源。
- 4.2.4 照明和反射测试图的均匀性:照明应满足测量程序中描述的均匀性要求。
- 4.2.5 光源幅度变化:光源应为固定水平,短期和供电幅度变化应小于±2%。
4.3 温度和相对湿度
- 测试数据获取期间的环境室温应为23°C±2°C,相对湿度应为50%±20%。
4.4 白平衡
- 对于彩色相机,应调整白平衡以适应照明光源,以确保RGB信号水平相等。
4.5 红外(IR)阻隔滤波器
- 如有需要,应使用红外阻隔滤波器。
4.6 像素积分时间
- 像素积分时间不应超过1/30秒。
4.7 压缩
- 如果DSC包含任何形式的有损压缩,应尽可能在噪声测量期间禁用压缩。如果无法关闭压缩,则应报告压缩级别。
噪声测量程序 (Noise measurement procedures)
噪声测量程序部分详细描述了如何测量DSC的噪声、中色调信噪比和DSC动态范围。以下是该部分的主要内容:
5.1 通用
- 这些测量程序用于确定噪声、中色调信噪比和DSC动态范围。测量噪声的方法取决于相机的类型和曝光自动化水平。
5.2 使用测试图测量DSC
- 5.2.1 通用:这些测量适用于除需要排除场景和/或镜头依赖性的所有相机。
- 5.2.2 OECF测量:首先根据ISO 14524测量相机光电转换函数(OECF)。
- 5.2.3 照明调整:调整光源以获得相机的8位每通道sRGB编码信号的背景像素值。
- 5.2.4 测试图:测试图应符合ISO 14524的相机OECF测试图。
- 5.2.5 非均匀性和图像结构空间分量:测试图的密度补丁的非均匀性应小于预期相机噪声水平的十分之一。
- 5.2.6 相机镜头聚焦:测试目标应由测试相机正确聚焦。
5.3 具有手动曝光控制的DSC的测量
- 5.3.1 通用:这些测量适用于使用手动曝光控制的相机,或需要排除场景依赖性时。
- 5.3.2 OECF测量:根据ISO 14524测量相机OECF。
- 5.3.3 照明调整:调整光源和扩散器以获得相机的最大未剪裁水平。
- 5.3.4 测试密度:使用一系列测试密度以提供信号水平以确定相机OECF。
- 5.3.5 扩散器设置:扩散器应均匀且靠近相机。
- 5.3.6 相机镜头聚焦:如果相机镜头聚焦可调,应设置为无限远。
5.4 具有可拆卸镜头的DSC的测量
- 5.4.1 通用:这些测量适用于需要排除镜头依赖性以及场景依赖性的相机。
- 5.4.2 OECF测量:根据ISO 14524测量焦平面OECF。
- 5.4.3 照明调整:应用5.3.3中的规定。
- 5.4.4 测试密度:使用5.3.4中指定的测试密度。它们应完全覆盖曝光区域。
6. 计算指标 (Calculation of metrics)
6.1 通用
这部分指出,使用噪声测量程序中定义的方法获得的测量结果将被转换为报告的噪声值。对于测试图情况下的5.2,需要捕获至少八张图像,并从每张图像中不小于64像素×64像素的中心区域确定平均像素值和噪声水平。对于5.3和5.4中进行的测量,需要为每个曝光或测试密度分别捕获至少八张图像,并从每张图像的中心区域确定平均像素值和噪声水平。
6.2 噪声 (Noise)
6.2.1 通用
相机噪声是通过将相机输出信号逆向OECF线性化后得到的输入信号(照度或曝光)的均方根(RMS)值来确定的。
6.2.2 照度测量的噪声确定
对于彩色相机,需要将输出信号转换为线性化的RGB信号,然后转换为Y/R-Y/B-Y通道,并使用以下公式计算噪声:
$$[ O_{\text{noise}} = \sqrt{Var(L_y) + 0.279 \times Var(L_R – L_y) + 0.088 \times Var(L_B – L_y)} ]$$
其中 $$( L_y ) $$是亮度通道信号,$$( L_R )$$$$( L_B ) $$分别是$$R-Y$$和$$B-Y$$通道信号。
6.2.3 曝光测量的噪声确定
如果使用焦平面OECF测量,相机噪声通过线性化曝光值从相机输出信号确定,应用与照度测量相同的方法。
6.3 信噪比 – 大面积 (Signal-to-noise ratios – large area)
6.3.1 通用
信噪比是输入信号(照度或曝光)水平与特定信号水平下的均方根噪声水平的比率。
6.3.2 确定计算信噪比的参考照度和照度值
参考照度是通过将相机OECF曲线上的像素值245对应的对数照度值确定的:
$$[ S_{\text{ref}} = \text{OECF}^{-1}(245) ]$$
6.3.3 确定总信噪比
总信噪比 $( Q_{\text{total}} ) $由以下公式确定:
$$[ Q_{\text{total}} = \frac{L_{\text{SNR}}}{O_{\text{total}}} ]$$
6.3.4 确定时间信噪比
时间信噪比 $( Q_{\text{temp}} ) $由以下公式确定:
$$[ Q_{\text{temp}} = \frac{L_{\text{SNR}}}{O_{\text{temp}}} ]$$
6.3.5 确定固定模式信噪比
固定模式信噪比 $( Q_{\text{FPN}} ) $由以下公式确定:
$$[ Q_{\text{FPN}} = \frac{L_{\text{SNR}}}{O_{\text{FPN}}} ]$$
6.4 DSC动态范围 (DSC dynamic range)
6.4.1 通用
DSC动态范围是输入信号(照度或曝光)饱和水平与至少具有1的信噪比的最小输入信号水平的比率。
6.4.2 照度测量的DSC动态范围确定
DSC动态范围 ( D R ) 由以下公式确定:
$$[ D R = \frac{L_{\text{sat}}}{L_{\text{min}}} ]$$
6.4.3 曝光测量的DSC动态范围确定
如果使用焦平面OECF测量,应用与照度测量相同的方法确定曝光饱和水平和最小曝光水平。
7. 结果呈现 (Presentation of results)
7.1 通用
至少需要指定和报告测试数字相机的中色调信噪比和DSC动态范围。此外,也可以单独表示固定模式和时间噪声分量的中色调信噪比。
7.2 信噪比
对于照度测量情况,报告的中色调信噪比是按照6.3.3确定的,使用6.3.2中指定的照度值。时间信噪比和固定模式信噪比分别按照6.3.4和6.3.5确定。
7.3 DSC动态范围
DSC动态范围是按照6.4.2和6.4.3确定的比率报告的。此外,DSC动态范围也可以作为密度范围或f-stop报告。
- 如果作为密度范围报告,则使用以下公式计算DSC动态范围:
$$[ D R_{\text{density}} = \log_{10}\left(\frac{L_{\text{sat}}}{L_{\text{min}}}\right) ]$$ - 如果以f-stop报告,则使用以下公式计算DSC动态范围:
$$[ D R_{\text{f-stop}} = \frac{L_{\text{sat}}}{L_{\text{min}}} ]$$
附录A (AnnexA):噪声分量分析
附录A提供了从数字相机捕获的图像样本中分析噪声分量的方法,这些噪声分量包括固定模式噪声(FPN)和时间变化噪声。这部分是规范性的,意味着它对标准的应用是强制性的。
A.1 对象
- A.1.1 通用:目标是从多个样本及其平均值中估计噪声分量的真实水平。
- A.1.2 分析:图像的噪声由固定模式分量和时间变化分量组成,假设这两种噪声分量是不相关的。
A.1.3 平均噪声
- 公式 (A.9) 描述了如何将单个图像表示为固定模式和时间变化分量的总和:
$$[ P_i(x,y) = P_p(x,y) + P_{temp,i}(x,y) ]$$
其中 $( P_i(x,y) ) $是第 ( i ) 个图像,$( P_p(x,y) ) $是固定模式分量,$( P_{temp,i}(x,y) )$是时间变化分量。
A.1.4 时间噪声
- 公式 (A.18) 给出了时间噪声的标准差:
$$[ O_{temp} = \sqrt{\frac{1}{n-1} \sum_{j=1}^{n} O_{temp,j}^2} ]$$
A.1.5 固定模式噪声
- 公式 (A.20) 提供了固定模式噪声的标准差:
$$[ O_{fp} = \frac{O_{ave}}{O_{diff}} ]$$
A.2 方法使用八张图像
- A.2.1 逐步描述:提供了一个详细的步骤,包括图像的线性化、计算平均图像和评估标准差、计算每张图像与平均图像的差异等。
- A.2.2 用示例数据评估方法:提供了一个示例,展示如何使用八张图像的均值像素值、标准差等数据来计算噪声分量。
附录B (AnnexB):视觉噪声测量
附录B提供了测量视觉噪声水平的方法,这些噪声水平是基于人类视觉系统对噪声的感知。这部分也是规范性的。
B.1 通用
- 提供了一种基于算法的方法来测量视觉噪声,该算法与图像中噪声的视觉外观相关。
B.2 算法用于视觉噪声测量
- B.2.1 RGB到XYZ(E):描述了如何将RGB图像转换为XYZ颜色空间。
- B.2.2 XYZ(E)到对手空间AC,C2:将XYZ颜色空间转换为对手颜色空间。
- B.2.3 离散傅里叶变换(DFT):将对手响应从空间域转换到频率域。
- B.2.4 应用对比度敏感度函数(CSF):使用CSF对频率数据进行加权,以模拟人眼的视觉敏感度。
- B.2.5 逆傅里叶变换:将加权后的响应转换回空间域。
- B.2.6 对手空间AC,C2到XYZ(E):将对手颜色响应转换回XYZ颜色空间。
- B.2.7 XYZ(E)到XYZ(D65):将XYZ颜色空间从E光源转换到D65光源。
- B.2.8 XYZ(D65)到Lab:将XYZ颜色空间转换为CIE Lab颜色空间。
- B.2.9 确定每个灰度补丁的标准差:计算L’、a和b颜色通道的噪声方差。
- B.2.10 表示视觉噪声的加权和:定义视觉噪声为L’、a和b颜色通道的噪声方差的加权和的平方根:
$$[ V = \sqrt{Var(L’) + (0.3380 \times Var(a^)) + (0.3950 \times Var(b^))} ]$$
B.3 视觉噪声测量
- 描述了测试条件,包括测试图表和捕获条件。
B.4 报告结果
- 规定了如何报告视觉噪声的测量结果,包括每个OECF图表补丁的平均sRGB像素值、对应的L*值和视觉噪声水平。
附录C (AnnexC):从图像信号中移除低频变化
附录C提供了一种方法,用于从图像信号中移除低频变化,这些变化可能由镜头遮蔽或非均匀测试图表照明引起,可能会影响噪声测量。
C.1 通用
- 描述了许多数字静态相机(DSC)表现出的镜头遮蔽特性,以及非均匀测试图表照明可能引入的低频变化。这些非均匀性在测量噪声之前需要从图像信号中去除,因为它们会增加测量的噪声标准差。
C.2 应用高通滤波器
- 附录C指定了一个13×13 taps的FIR(有限脉冲响应)高通滤波器,用于与线性化的图像信号$$(L_y, L_r – L_y,)$$和$$(L_g – L_y)$$卷积,以去除图像信号中的低频变化。
- 该高通滤波器仅应用于总噪声、固定模式噪声和时间噪声信噪比的评估。它不应用于视觉噪声测量,因为在高图像分辨率下,滤波器会影响人眼对亮度对比度敏感度函数的频率范围。
高通滤波器核(部分展示)
下表展示了13×13核的一个象限的值,完整的核通过关于第一行和第一列的反射定义。
| 0.996926 | 0.00647 | -0.0074 | … |
|---|---|---|---|
| 0.00609 | -0.0096 | 0.00382 | … |
| … | … | … | … |
注意:表格中的值是对称的,完整的13×13核通过反射这些值来构建。
附录D (AnnexD):确定信噪比的程序
附录D提供了一个详细的步骤指南,用于确定数字静态相机(DSC)的信噪比(SNR)。这个程序是资料性的,旨在指导用户如何进行信噪比的测量和计算。以下是该部分的详细内容:
D.1 确定系统OECF
这一步骤涉及测量相机的光电转换函数(OECF),这是描述相机如何将场景的亮度转换为数字图像信号的函数。
- 计算对数照度值:首先,从OECF图表的补丁测量得到的照度值 ( L ) 计算对数照度值 ( S ):
$$[ S = \log_{10}(L) ]$$
其中,( j = 1 ) 到 ( N ),( N ) 是图表中补丁的数量。 - 估计平均像素值:从捕获的目标图像中,对每个补丁估计平均的红、绿、蓝像素值,通过对每个补丁中心的64×64区域取平均值。
- 描述相机OECF:使用以下公式描述相机的OECF:
$$[ P_{x,j} = \text{OECF}x(S_j) ] $$其中 ( x ) 代表颜色通道(红、绿或蓝),$$( P{x,j} )$$ 是第 ( j ) 个补丁中颜色通道 ( x ) 的平均像素值。
D.2 线性化输出像素值到输入照度值
这一步骤涉及将相机的输出像素值转换为输入照度值。
- 逆OECF转换:使用逆OECF将红、绿、蓝像素值转换为对应的对数照度值:
$$[ S_x = \text{OECF}_x^{-1}(P_x) ]$$
其中 $$( S_x ) $$对应于红、绿、蓝对数照度值。 - 转换为照度值:将对数照度值转换为照度值:
$$[ L_x = 10^{S_x} ]$$
其中 ( L_x ) 对应于红、绿、蓝照度值。 - 计算亮度分量:从红、绿、蓝照度值计算亮度分量 ( L_y ):
$$[ L_y = 0.2126 \times L_r + 0.7152 \times L_g + 0.0722 \times L_b ]$$ - 计算方差:计算每个补丁的亮度、红色和蓝色分量的方差:
$$[ O_{\text{noise},j} = \sqrt{Var(L_y) + 0.279 \times Var(L_r – L_y) + 0.088 \times Var(L_b – L_y)} ]$$
D.3 计算信噪比
这一步骤涉及确定参考对数照度值 $$( S_{\text{ref}} )$$ 和计算信噪比 $$( Q_{\text{total}} )$$。
- 确定参考对数照度值:对于8位sRGB图像,参考对数照度值 $$( S_{\text{ref}} ) $$对应于数字级别245的对数照度值。对于其他颜色编码,参考照度是线性化相机剪裁值的91%。
- 确定对数照度值$$( S_{\text{SNR}} )$$:计算 $$( S_{\text{SNR}} )$$,它对应于参考对数照度值加上 $$( \log_{10}(0.13) )$$。
- 计算信噪比:信噪比 $$( Q_{\text{total}} ) $$在对数照度值 $$( S_{\text{SNR}} ) $$处的值可以通过以下公式确定:
$$[ Q_{\text{total}} = \frac{L_{\text{SNR}}}{O_{\text{noise},\text{SNR}}} ]$$
其中 $$( L_{\text{SNR}} )$$是$$ ( S_{\text{SNR}} )$$ 对应的照度值,$$( O_{\text{noise},\text{SNR}} )$$是在该照度值下的噪声水平。
附录E (AnnexE):不同输出媒体的实际观看条件
附录E提供了针对不同图像输出媒体的推荐观看条件,这些条件包括图像尺寸、观看距离和照明条件,以确保图像质量的准确评估。
E.1 通用
这部分描述了不同输出媒体的典型观看条件,以帮助评估图像质量。
- E.1.1 消费级照片打印观看:推荐观看尺寸为100×150mm的照片,观看距离为250mm,照明条件符合ISO 3664标准,即CIE照明D50,照度500lx±125lx。
- E.1.2 计算机显示器观看:图像以100%放大率在计算机显示器上观看,观看距离为600mm,显示器分辨率约为每毫米4像素,显示亮度应大于100 cd/m²,白点色度接近D65。
- E.1.3 专业照片打印观看:推荐观看尺寸为400×600mm的照片,观看距离为750mm,照明条件符合ISO 3664标准。
- E.1.4 手机观看:在89mm(对角线)的显示屏幕上观看图像,分辨率为960×640像素,观看距离为250mm。
- E.1.5 HDTV观看:在1920×1080分辨率、1070mm(对角线)的HDTV显示器上全屏观看图像,观看距离为1.74m。
这些条件有助于减少因观看环境不同而导致的图像质量评估差异。
附录F (AnnexF):将视觉噪声映射到噪度JND的感知均匀性
附录F介绍了将视觉噪声测量值映射到噪度JND(Just Noticeable Difference)的方法,这是一种衡量图像中噪声对观察者而言可察觉程度的指标。
F.1 通用
这部分描述了视觉噪声度量与感知噪声之间的关系,并引入了JND作为衡量噪声可察觉度的单位。
F.2 JND映射函数设计
这部分描述了如何通过观察者实验确定图像中噪声的JND,即观察者能够察觉的噪声差异。
F.3 噪度JND映射函数
这部分提供了从视觉噪声值 ( V ) 到噪度JND的映射函数:
$$[ \text{FIND}(V) = \frac{w_1 – V^3}{1 + w_2 – V^3} ]$$
其中 $( w_1 )$ 和 $( w_2 ) $是常数,具体值在F.1节中给出。
这个函数通过回归分析数据集获得,数据集包含了不同噪声水平的图像块,并由观察者标注了JND值。
F.4 噪度JND映射函数图示
这部分提供了噪度JND映射函数的图形表示,展示了视觉噪声值 ( V ) 与噪度JND之间的关系。
下图是噪度JND映射函数的图示:
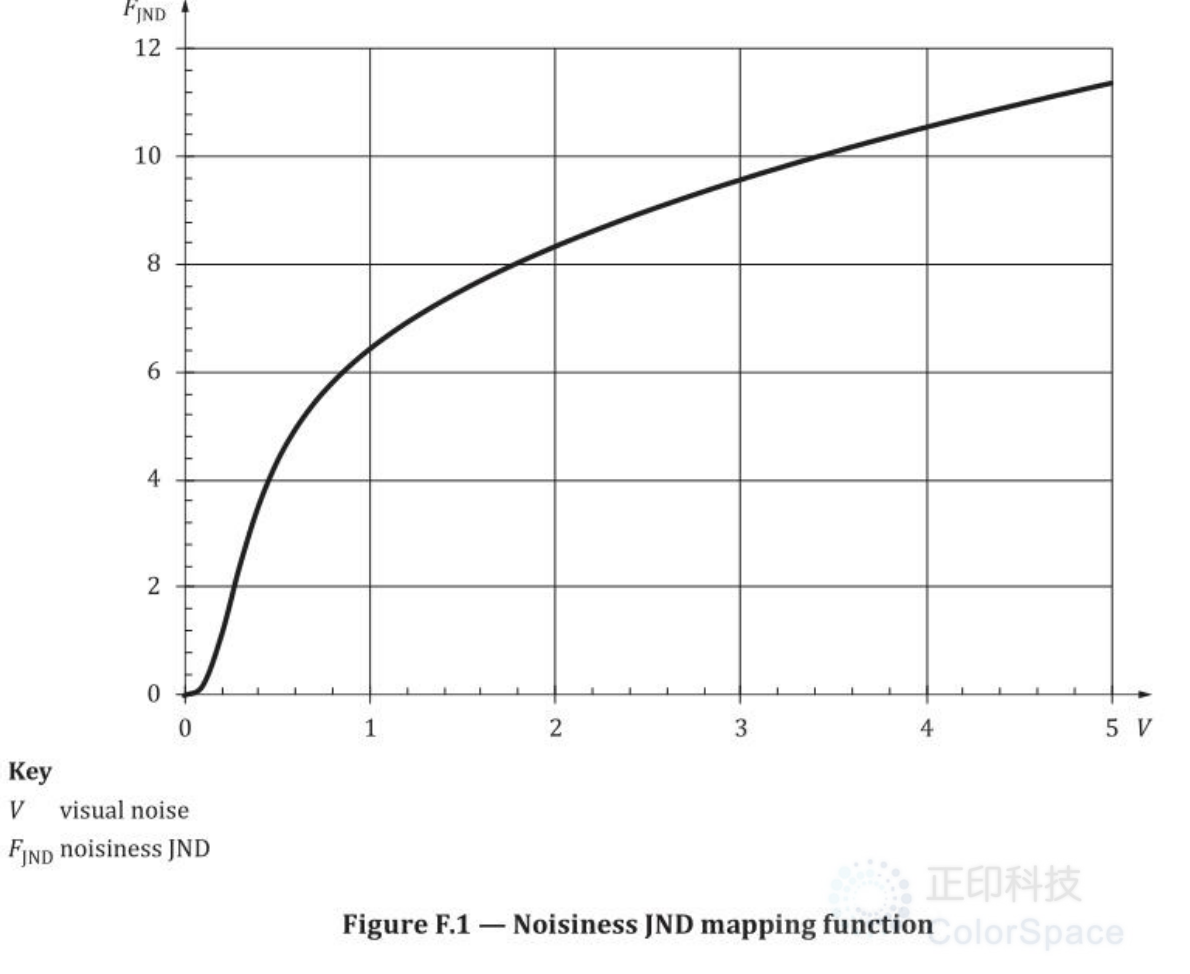
图示:噪度JND映射函数
这个图示显示了视觉噪声值 ( V ) 与噪度JND之间的关系,其中 ( V ) 是视觉噪声值,FIND是噪度JND值。
这些附录提供了重要的工具和方法,用于在不同条件下评估和比较图像质量,以及理解图像中噪声对人类视觉的影响。
相关推荐阅读:
Was this helpful?
11 / 2

[…] | 噪声Noise ISO 15739:噪声测量 用于动态范围测量的场景分析噪声和 […]
Imatest测量方法怎么没有写
您好,复制链接到浏览器打开即可查看imatest测量方法:https://kb.colorspace.com.cn/kb/2021/07/06/color-tone-auto-iso15739%e6%a8%a1%e5%9d%97%e4%bd%bf%e7%94%a8%e6%8c%87%e5%af%bc/